🚀 PID Full Stack Design with Root Locus & Python
Автор: Gradual Growth 8
Загружено: 2026-02-02
Просмотров: 14
Описание:
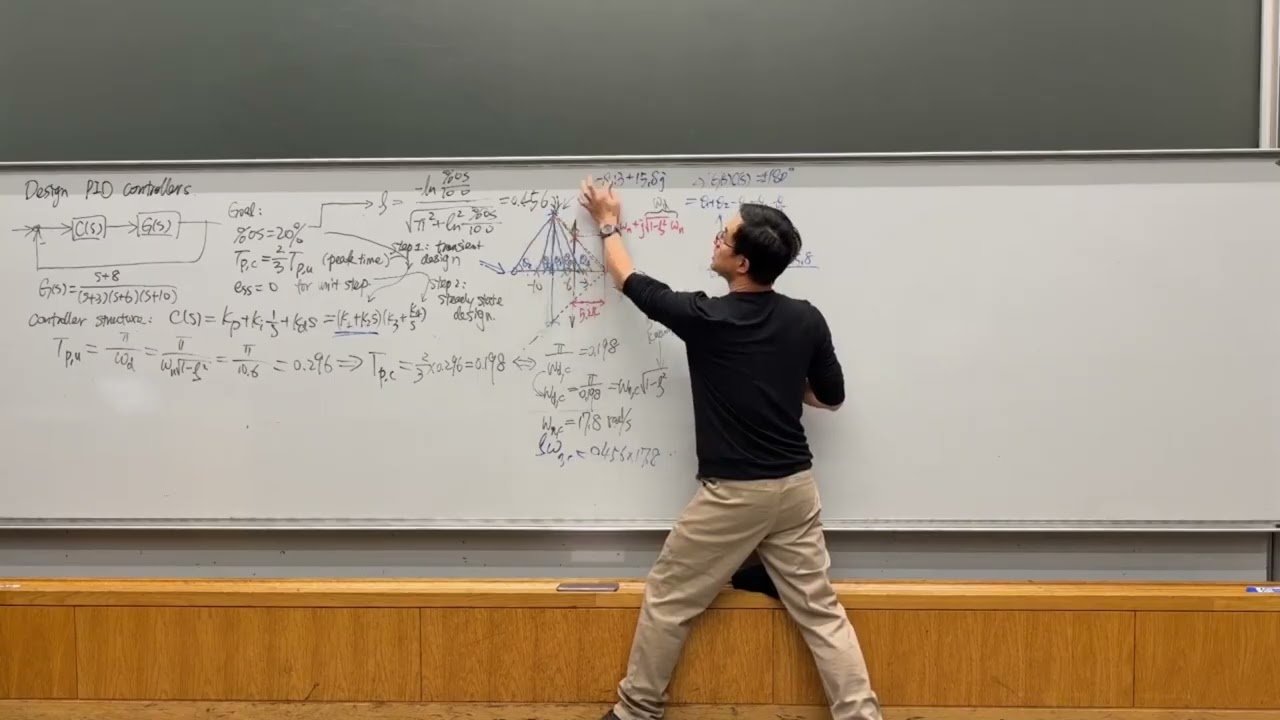
This comprehensive tutorial walks through the "full stack" design of a PID controller, bridging analytical root locus methods with practical Python implementation. Starting from a third-order plant, we define specific performance requirements for overshoot, peak time, and steady-state error.
The session is divided into two major phases:
Analytical Design: We use root locus techniques on the board to translate performance goals into desired closed-loop pole locations. We then calculate the necessary PD zero placement for transient improvement and specify the integral action required to eliminate steady-state error.
Computational Implementation: Using Python and the control library, we verify our manual calculations, perform root locus plotting, and simulate the step responses of the uncompensated (P), transient-improved (PD), and final PID systems.
By the end of this video, you will see how the theoretical 180° angle condition and second-order approximations translate directly into functional code that achieves precise control objectives.
00:00 Session Introduction and Problem Statement
01:10 Controller Structure: Decomposing PID into Transient (PD) and Steady-State (I) Parts
02:11 Translating Performance Goals: Overshoot to Damping Ratio (Zeta)
03:34 Root Locus Analysis for the Uncompensated Third-Order System
05:00 Second-Order Approximation and Peak Time Calculations
07:31 Determining Target Closed-Loop Pole Locations
09:56 PD Zero Placement: Applying the 180-Degree Angle Condition
14:14 Adding Integral Action: Zero/Pole Placement for Zero Steady-State Error
15:58 Python Implementation: Setting up the Control Toolbox and Environment
16:45 Computational Root Locus Plotting for Gain Selection
18:59 Verifying the Complete PD Design in Python
20:41 Final PID Tuning and Gain Verification
22:10 Step Response Comparison: P vs. PD vs. PID Performance
23:43 Final Results Analysis and Design Summary
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















