High Resolution Tactile Sensing for HCI, Robotics and VR/AR: Wojciech Matusik
Автор: MIT.nano
Загружено: 2019-11-01
Просмотров: 7911
Описание:
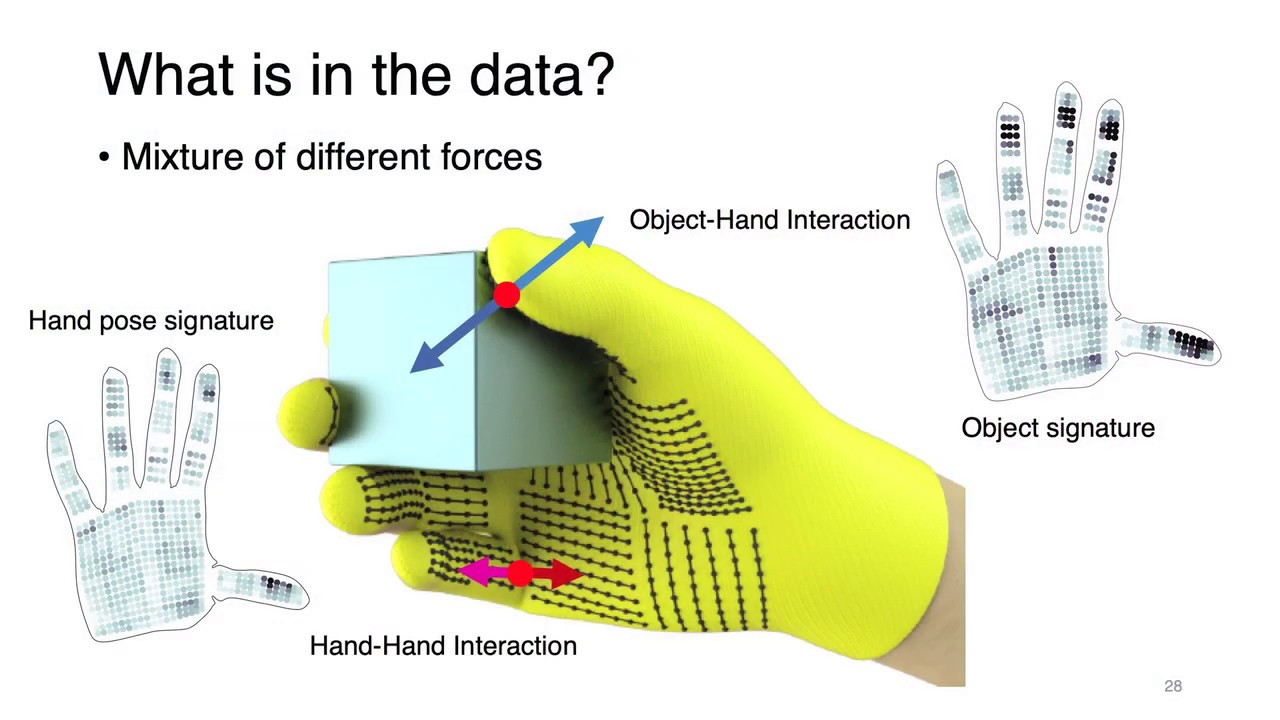
Humans can feel, weigh and grasp diverse objects, and simultaneously infer their material properties while applying the right amount of force—a challenging set of tasks for a modern robot. Mechanoreceptor networks that provide sensory feedback and enable the dexterity of the human grasp remain difficult to replicate in robots. Although computer-vision-based robot grasping strategies have progressed substantially, there are as yet no equivalent sensing platforms and large-scale datasets with which to probe the use of the tactile information that humans rely on when grasping objects.
Wojciech Matusik is a Professor of Electrical Engineering and Computer Science at the Computer Science and Artificial Intelligence Laboratory at MIT, where he leads the Computational Fabrication Group and is a member of the Computer Graphics Group.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: