Detailed MPU6050 Tutorial
Автор: Maker's Wharf
Загружено: 2022-01-25
Просмотров: 49099
Описание:
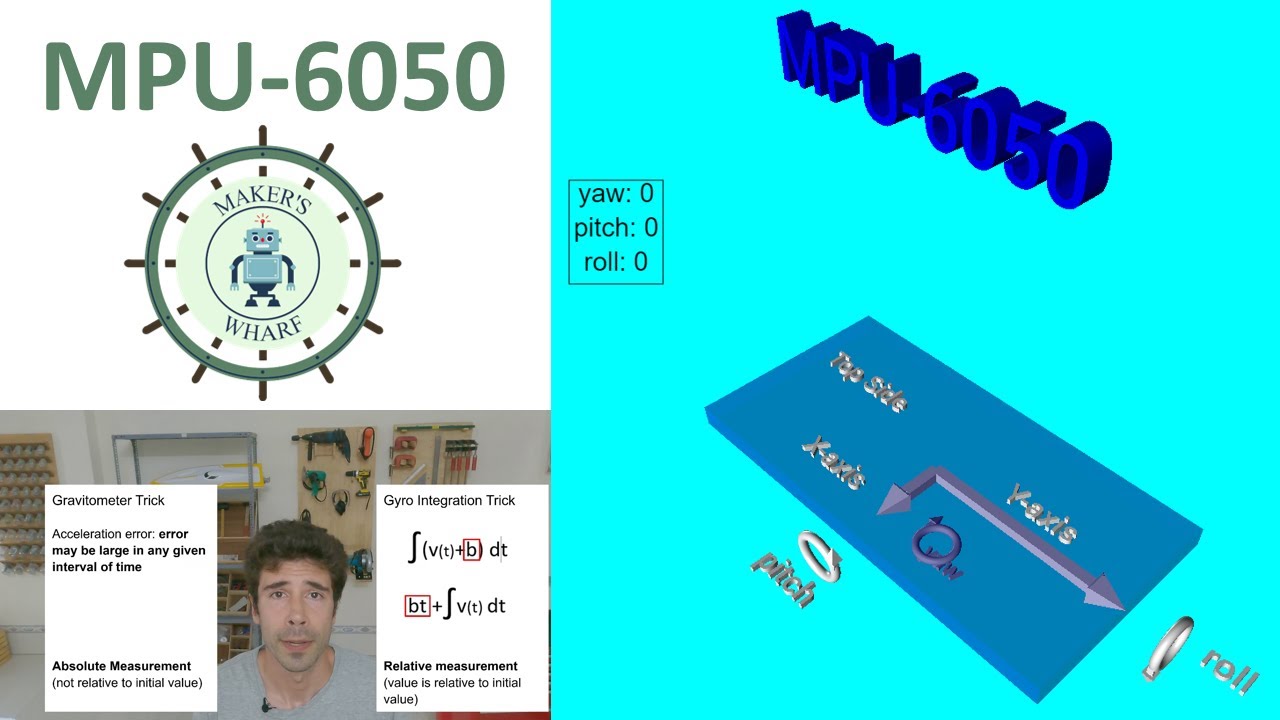
Learn how an MPU measures orientation. Hide Jeff Rowberg's complex library behind a simple and easy to use interface. Fix Jeff's flawed conversion from quaternion to yaw pitch and roll. Learn how to save calibration results to EEPROM so that you don't have to calibrate every time you power on. Overhaul the current animation process.
🚃 Related tutorials 🚃:
--------------------------------------
Full C++ series: • C++
Visual Studio code for Arduino: • Configuring Visual Studio Code for Arduino
Dependency Injection: • Dependency Injection in C++
Header files: • C++ header files
Class constructors: • Class constructors in C++
🚅 Chapters 🚅:
--------------------------
00:00 Overview
00:25 Measuring yaw pitch and roll
01:23 Equivalence principle
02:28 Orientation from gravity
03:57 Orientation from angular acceleration
05:17 Sensor fusion
06:40 Getting an MPU-6050 that actually works
08:49 Wiring diagram
09:37 Loose connections
10:50 Arduino Library
12:12 Dependency Injection
13:45 Visual Studio
15:10 Hiding library behind simple interface
25:27 From quaternion to yaw, pitch, roll
32:01 Calibration
33:44 EEPROM
39:52 How to call our MPU interface
43:11 Reset calibration demo
44:09 Calibration demo
44:53 Animation
45:18 Processing.exe, Toxiclibs
45:40 VPython
49:56 Sending data to python over serial
50:49 Rodrigues' rotation formula
52:24 Test procedure
54:25 Checking for gimbal locks
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:





![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://ricktube.ru/thumbnail/Kv1Hiv3ox8I/mqdefault.jpg)













