Motion Control of Anthropomorphic Schunk 5-Finger-Hand on Robotic Arm LWA 4P
Автор: FZIchannel
Загружено: 2014-03-31
Просмотров: 23702
Описание:
ENGLISH:
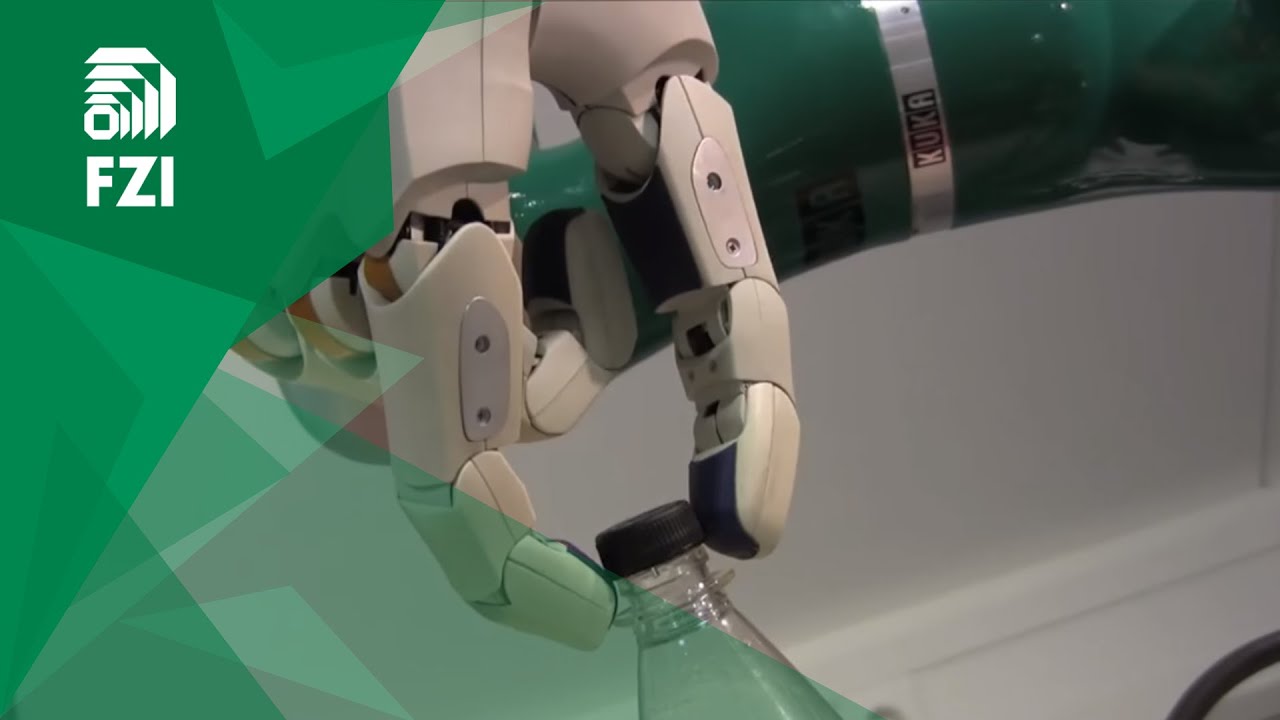
The anthropomorphic SCHUNK 5-Finger-Hand is used together with the lightweight robotic arm LWA 4P to simulate human motions. The size, weight, and flexibility of the 5-Finger-Hand are very similar to a real human hand and can be used for dexterous manipulation and gestures. A new developed ROS driver for the hand controls all nine active joints and is used together with the ROS motion driver of the 6-DOF arm. An intuitive teach-in interface with the ability to add, edit and save new key pose makes it easy to create new trajectories for a desired task. The trajectories between these key points are interpolated automatically. The hand and arm trajectories are synchronized and create smooth combined motions as shown in the video.
Filmed at the SCHUNK Expert Days 2014, Hausen, Germany.
DEUTSCH:
Die anthropomorphe SCHUNK 5-Finger Hand wird zusammen mit dem Leichtbau-ARM LWA 4P genutzt, um menschliche Bewegungen zu simulieren. Die Größe, das Gewicht sowie die Beweglichkeit der 5-Finger-Hand kommen den Werten einer menschlichen Hand sehr nahe. Die Hand kann besonders gut für anspruchsvolle Greif- und Manipulationsaufgaben sowie zur Darstellung menschlicher Gesten eingesetzt werden. Der neu entwickelte ROS-Treiber steuert alle neun Motoren an und wird zusammen mit dem ROS-Arm-Treiber eingesetzt. Eine intuitive „Einlern-Oberfläche" ermöglicht es, neue Arm- und Hand-Posen anzulegen, zu editieren und abzuspeichern. So können auf einfache Art und Weise neue Bewegungen erstellt werden. Die dazugehörigen Trajektorien werden automatisch aus den zuvor festgelegten Posen berechnet. Die synchronisierten Arm- und Hand-Trajektorien erzeugen so die im Video gezeigten flüssigen Gesamtbewegungen.
Das Video wurde auf den SCHUNK Expert Days 2014 in Hausen aufgenommen.
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: