Скачать
Apple Harvesting with Leaf Manipulation in NVIDIA Isaac Sim
Автор: Pieter Blok
Загружено: 2026-06-03
Просмотров: 181
Описание:
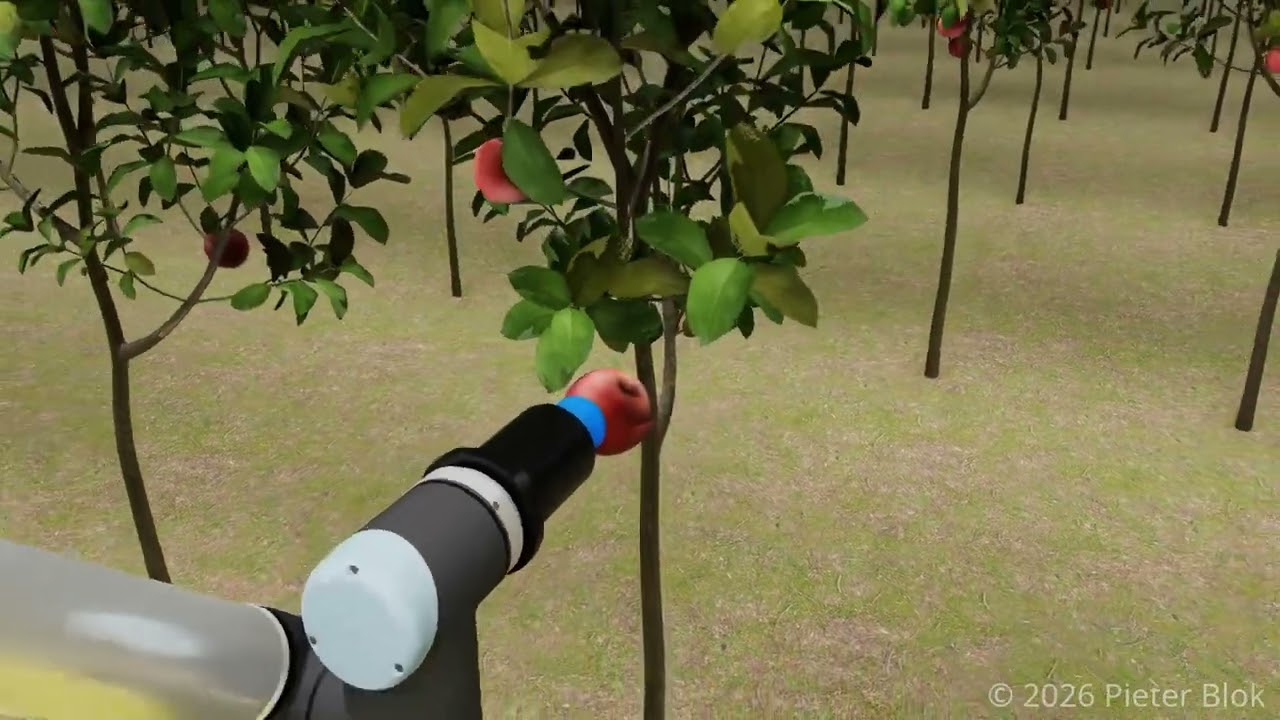
Physically challenging tasks, like pushing a leaf aside, are hard to deploy on real robots. This simulation demonstrates a robot policy that pushes the leaf away so the apple can be successfully harvested with the end-effector's suction cup. Deployed in NVIDIA Isaac Sim 5.1.0.
Robot specifications:
mobile robot: Clearpath Robotics Warthog
manipulator: UR10 with suction cup
motion generator: RMPflow
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: