Self-Balancing Quadruped Spider Robot with ROS2 and Neon 3D GUI
Автор: razer x_pro
Загружено: 2026-01-18
Просмотров: 13
Описание:
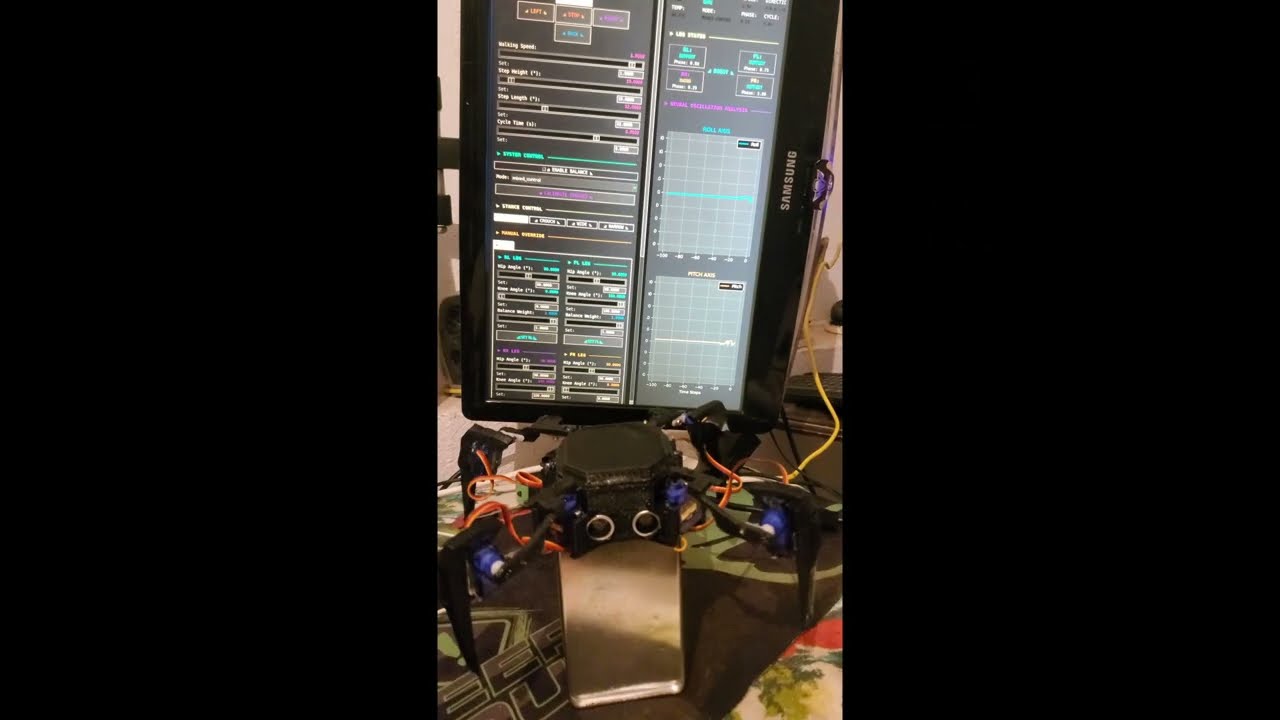
This DIY quadruped robot (styled like a spider with four legs and eight servos) uses an ESP32, micro-ROS, and ROS2 for advanced self-balancing with PID control, smooth walking gaits, and obstacle distance sensing via ultrasonic. It includes a stunning cyberpunk-themed GUI with real-time 3D orientation visualization, roll/pitch plots, PID tuning, and manual/keyboard controls. Perfect for robotics enthusiasts!
Capabilities:
Auto-balances on uneven surfaces using MPU6050 IMU
Walks forward/backward/left/right with adjustable speed and gait
Publishes distance data from HC-SR04 (ready for future obstacle avoidance)
Cyberpunk GUI with neon styling and 3D robot attitude cube
Keyboard or button control, per-leg overrides, sensor calibration
Check me at :
www.instructables.com/member/xprobyhimself/
AND
github.com/ReizarXPro/MicroRos-Spider-Robot-quadrupedV3-/blob/main/README.md
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















