[ICRA 2023] External Camera-based Mobile Robot Pose Estimation for Collaborative Perception ...
Автор: Raphael M
Загружено: 2023-07-31
Просмотров: 172
Описание:
Simon Bultmann, Raphael Memmesheimer, and Sven Behnke:
External Camera-based Mobile Robot Pose Estimation for Collaborative Perception with Smart Edge Sensors
IEEE International Conference on Robotics and Automation (ICRA), London, UK, June 2023.
Abstract:
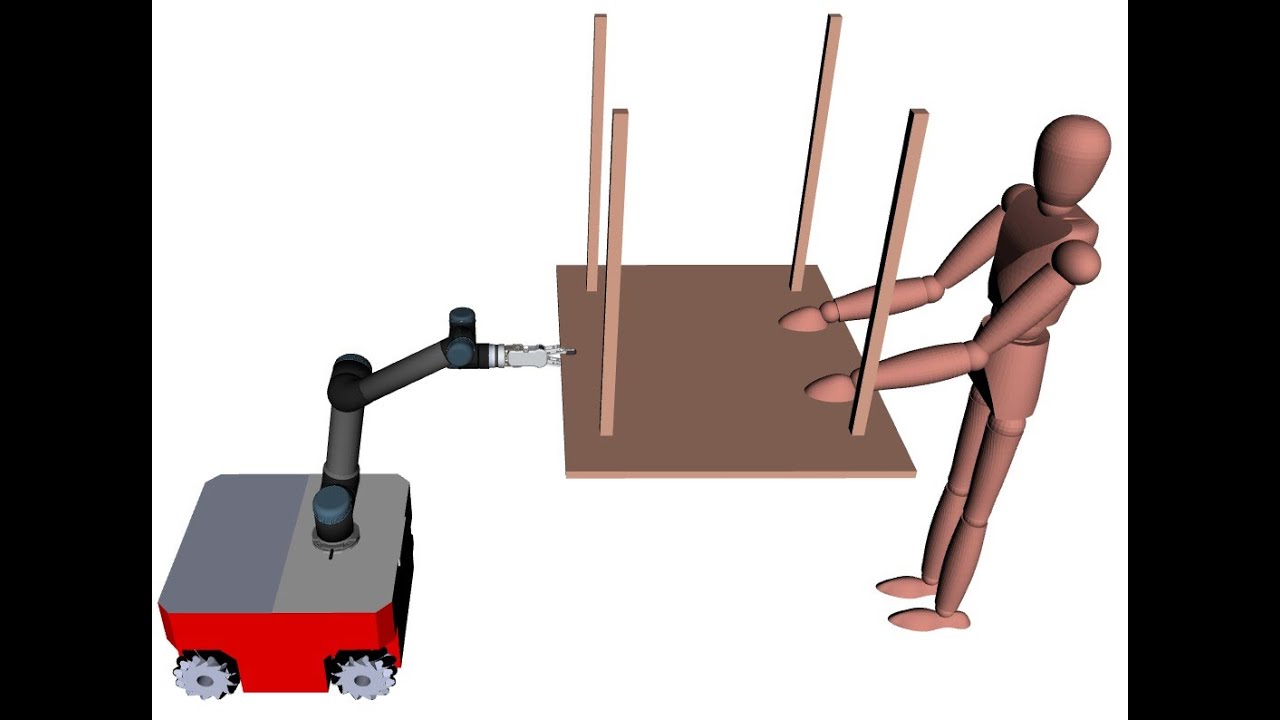
We present an approach for estimating a mobile robot's pose w.r.t. the allocentric coordinates of a network of static cameras using multi-view RGB images. The images are processed online, locally on smart edge sensors by deep neural networks to detect the robot and estimate 2D keypoints defined at distinctive positions of the 3D robot model. Robot keypoint detections are synchronized and fused on a central backend, where the robot's pose is estimated via multi-view minimization of reprojection errors. Through the pose estimation from external cameras, the robot's localization can be initialized in an allocentric map from a completely unknown state (kidnapped robot problem) and robustly tracked over time. We conduct a series of experiments evaluating the accuracy and robustness of the camera-based pose estimation compared to the robot's internal navigation stack, showing that our camera-based method achieves pose errors below 3 cm and 1° and does not drift over time, as the robot is localized allocentrically. With the robot's pose precisely estimated, its observations can be fused into the allocentric scene model. We show a real-world application, where observations from mobile robot and static smart edge sensors are fused to collaboratively build a 3D semantic map of a ∼240 m2 indoor environment.
arXiv: https://arxiv.org/abs/2303.03797
Повторяем попытку...
![[ICRA 2023] External Camera-based Mobile Robot Pose Estimation for Collaborative Perception ...](https://imager.clipsaver.ru/e2LpcZDWaZc/max.jpg)
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:

![[SII 2026] Anticipating Human Behavior for Safe Navigation and Efficient Collaborative Manipulation](https://imager.clipsaver.ru/9tHCVgKY1ak/max.jpg)












![[WACV 2026 Oral] OracleGS: Grounding Generative Priors for Sparse-View Gaussian Splatting](https://imager.clipsaver.ru/U7iWDMsJUHQ/max.jpg)