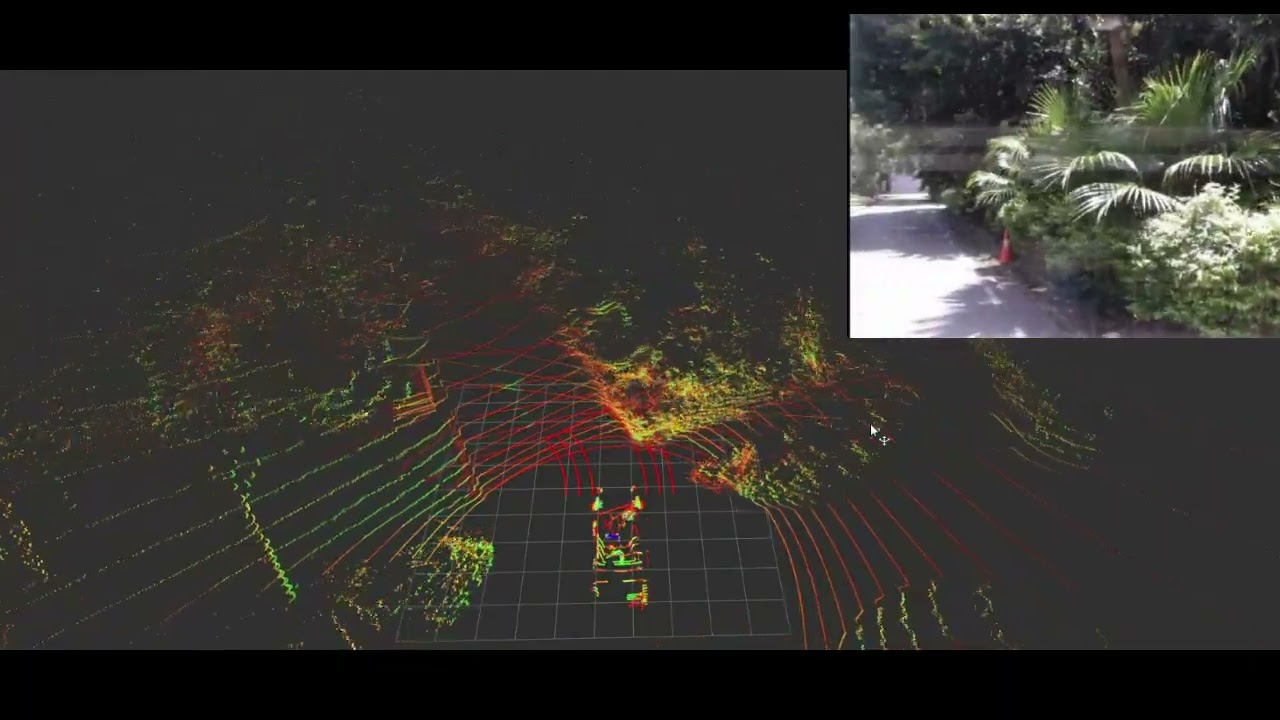
Lateral control with obstacle detection of driverless minibus tested on NTNU Campus. (x2 speed)
Автор: 黃美琳
Загружено: 2022-03-07
Просмотров: 583
Описание:
A vehicle lateral control design with the obstacle detection strategy based on Lidar data without using the learning-based method.
The lateral controller integrates preview control into the front-wheel feedback control. With the obstacle detection strategy, the designed lateral controller is implemented on a driverless minibus in a way of transportation service as tested in the campus route. From the conducted experiments, the feasibility of route tracking without any collision and no human intervention required is validated, which also depicts the potential for the strategy being an assurance of driverless transit service.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: