Скачать
hand to eye calibration
Автор: inje-sclab
Загружено: 2026-02-13
Просмотров: 8
Описание:
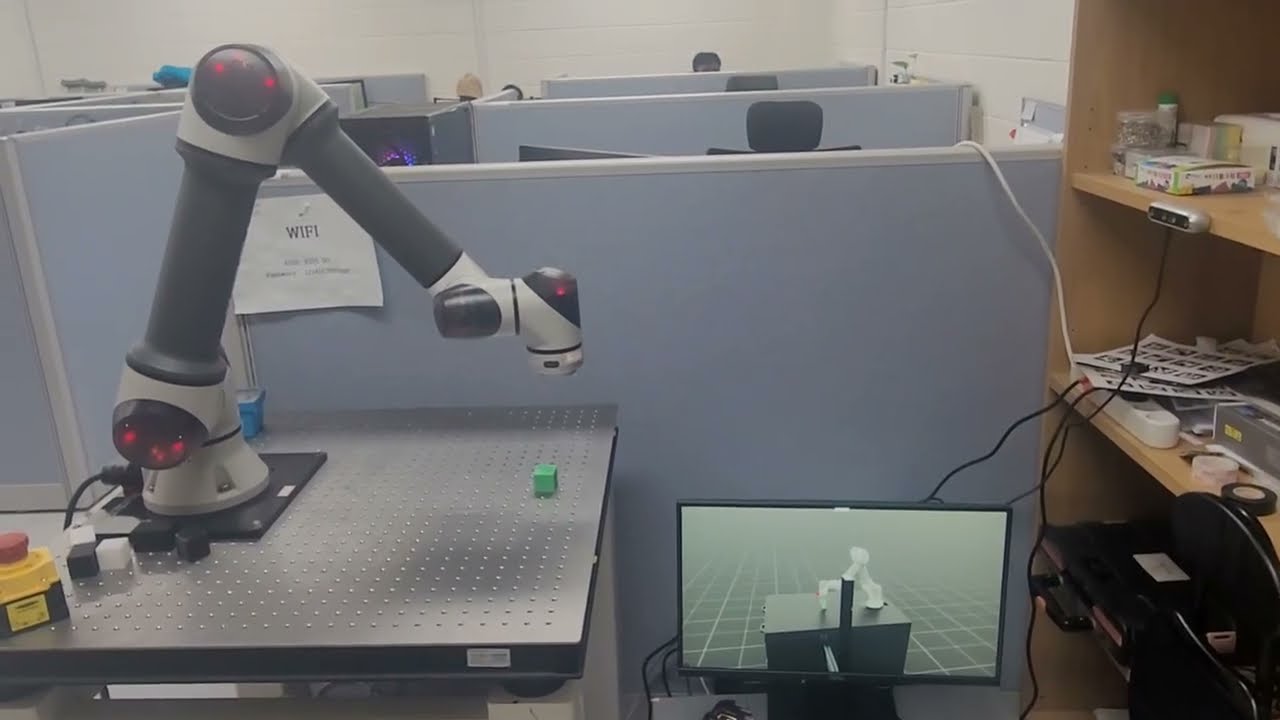
camera: realsense D455
robot: rb5-850
task: hand to eye calibration
content: After the camera finds the actual cube, the cube is created in the simulation as much as the actual location
!!!! Problem: There is a problem with the current gripper and the repair has been left !!!!
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: