DeforMoBot: A Bio-Inspired Deformable Mobile Robot for Navigation Among Obstacles (IEEE IROS Video)
Автор: Morph Lab, Imperial
Загружено: 2024-10-18
Просмотров: 1354
Описание:
IEEE IROS (International Conference on Intelligent Robots and Systems) Presentation Video of DeforMoBot: A Bio-Inspired Deformable Mobile Robot for Navigation Among Obstacles
B. W. Mulvey, T. D. Lalitharatne, and T. Nanayakkara, “DeforMoBot: A Bio-Inspired Deformable Mobile Robot for Navigation Among Obstacles,” IEEE Robotics and Automation Letters, 2023.
Link to IEEE RA-L paper: https://ieeexplore.ieee.org/document/...
Link to paper preprint: https://drive.google.com/file/d/10acy...
Digital Object Identifier: 10.1109/LRA.2023.3273393
Abstract:
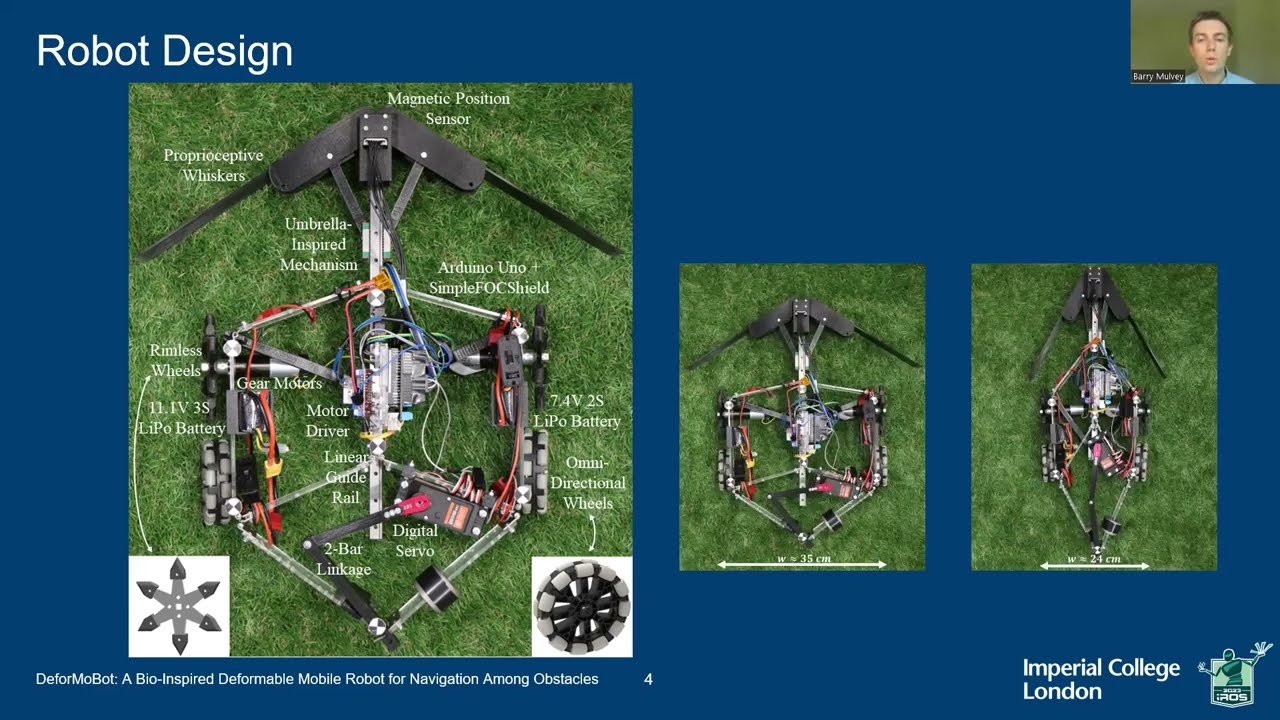
Many animals can move in cluttered environments by conforming their body shape to geometric constraints in their surroundings such as narrow gaps. Most robots are rigid structures and do not possess these capabilities. Navigation around movable or compliant obstacles results in a loss of efficiency—and possible mission failure—compared to progression through them. In this paper, we propose the novel design of a deformable mobile robot; it can adopt a wider stance for greater stability (and possible higher payload capacity), or a narrower stance to become capable of fitting through small gaps and progressing through flexible obstacles. We use a whisker-based feedback control approach in order to match the amount of the robot's deformation with the compliance level of the obstacle. We present a real-time algorithm which uses whisker feedback and performs shape adjustment in uncalibrated environments. The developed robot was tested navigating among obstacles with varying physical properties from different approach angles. Our results highlight the importance of co-development of environment perception and physical reaction capabilities for improved performance of mobile robots in unstructured environments.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















