Скачать
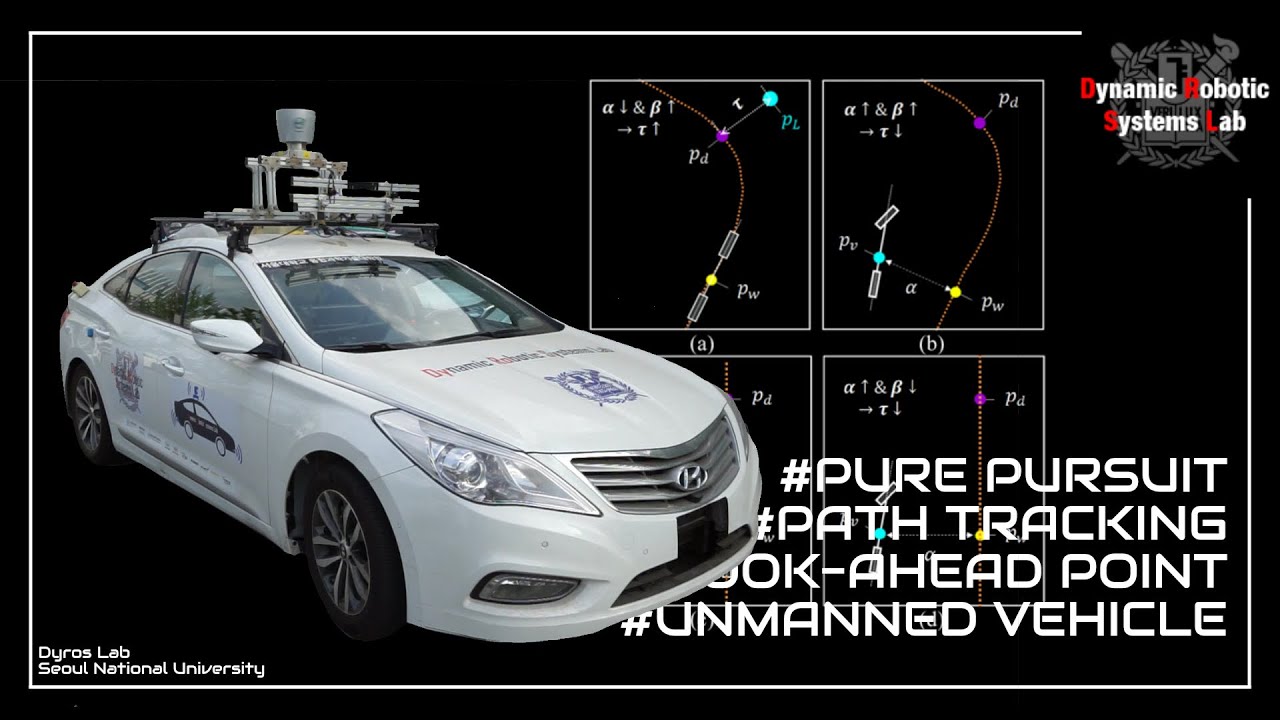
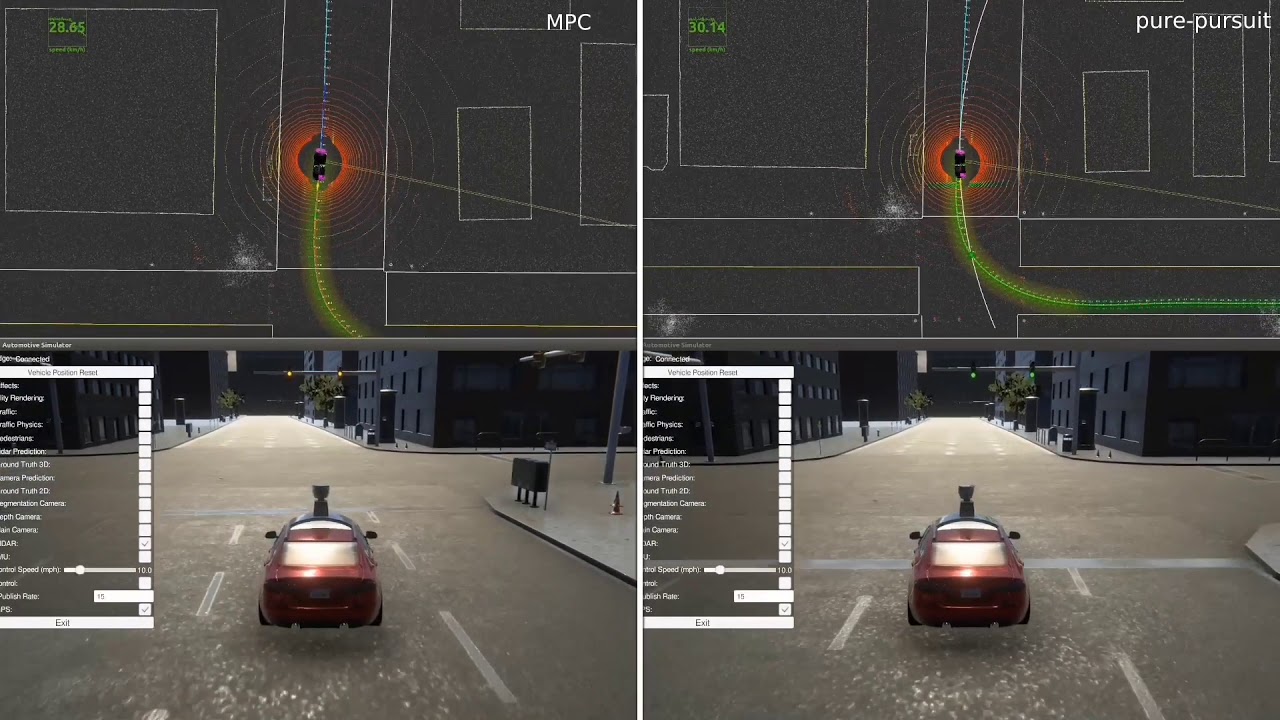
Accurate Path Tracking by Adjusting Look Ahead Point in Pure Pursuit Method
Автор: DYROS
Загружено: 2021-03-28
Просмотров: 1111
Описание:
AHN, Joonwoo, et al. ACCURATE PATH TRACKING BY ADJUSTING LOOK-AHEAD POINT IN PURE PURSUIT METHOD. International Journal of Automotive Technology, 22.1: 119-129.
http://ijat.net/journal/view.php?numb...
서울대학교 융합과학기술대학원
박재흥 교수 동적로보틱시스템연구실
Dynamic Robotic Systems Lab.
http://dyros.snu.ac.kr/
#Dyros #SNU #Robot
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:

![[Lab Meeting] Phase-Based NMPC for Humanoid Walking with Support Time Adjustment](https://imager.clipsaver.ru/G0Fsg7VORVo/max.jpg)

![[Dissertation] 자율주행 차량을 위한 실시간 샘플링 기반 경로 계획의 시간 개선 연구](https://imager.clipsaver.ru/rg-AsSNstTY/max.jpg)