Скачать
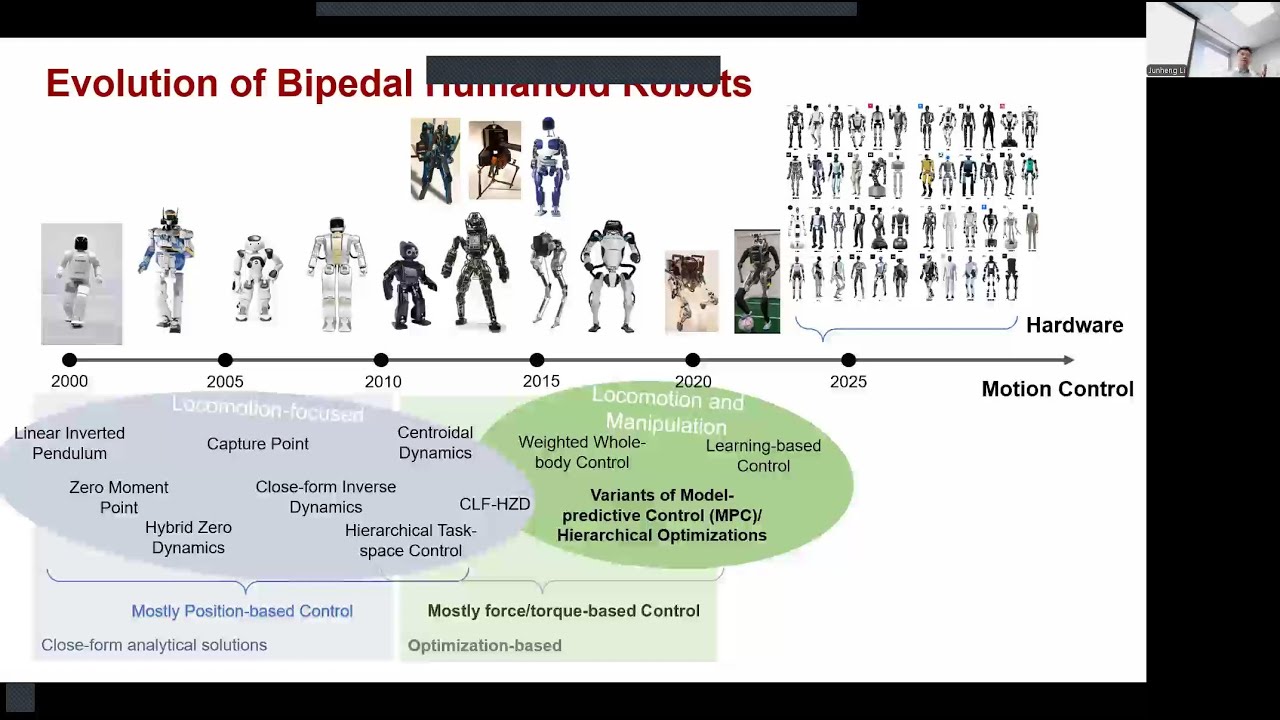
Hierarchical Optimization-based Control for Dynamic Loco-manipulation on Humanoid Robots-PhD Defense
Автор: Junheng Li
Загружено: 2025-08-27
Просмотров: 97
Описание: PhD Thesis Defense on "Hierarchical Optimization-based Control for Dynamic Loco-manipulation on Humanoid Robots" by Junheng Li
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:

![1 A.M Study Session 📚 [lofi hip hop]](https://image.4k-video.ru/id-video/lTRiuFIWV54)











![Неожиданная правда о 4 миллиардах лет эволюции [Veritasium]](https://image.4k-video.ru/id-video/Unxh6MnVIWc)