Carnegie Mellon University Master's Thesis Defense
Автор: Haolun Zhang
Загружено: 2023-04-20
Просмотров: 813
Описание:
My MSR thesis defense - Apr. 20, 2023
Title: Seeing in 3D: Towards Generalizable 3D Visual Representations for Robotic Manipulation
Abstract:
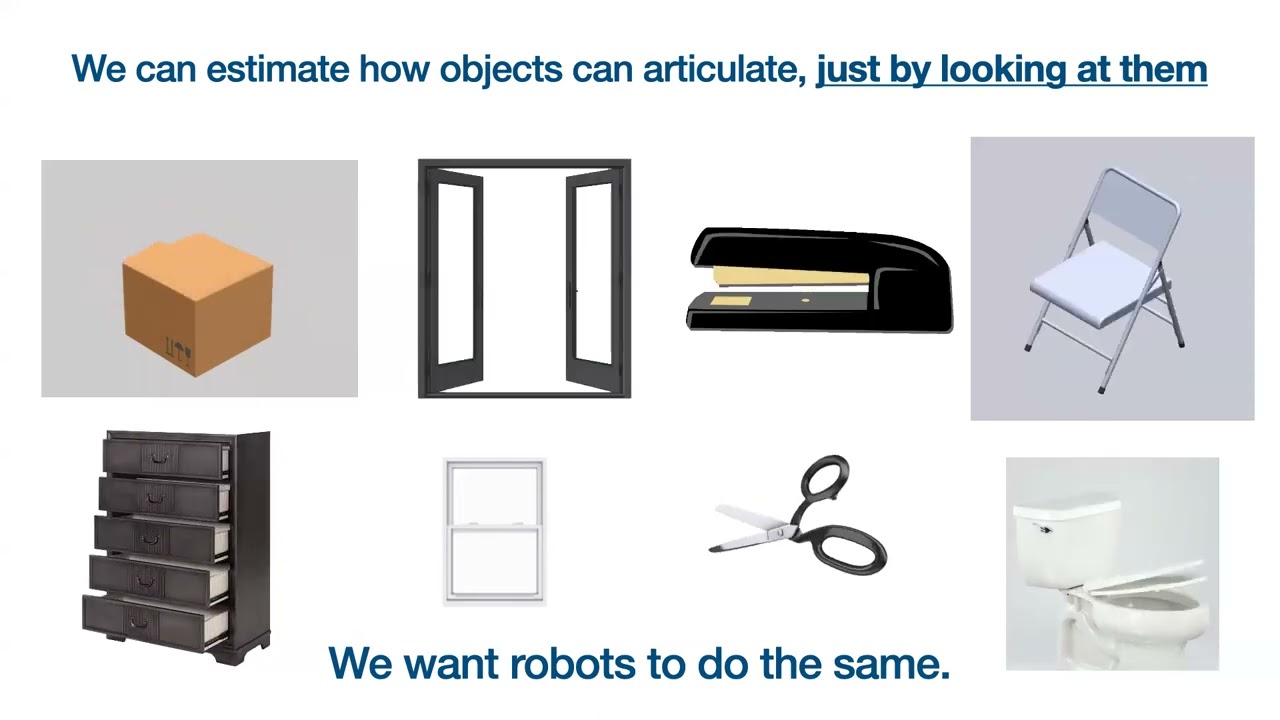
Despite the recent progress in computer vision and deep learning, robot perception remains a tremendous challenge due to the variations of the objects and the scenes in manipulation tasks. Ideally, a robot trying to manipulate a new object should be able to reason about the object’s geometric, physical, and topological properties. In this thesis, we aim to investigate different strategies for enabling a robot to reason about objects using 3D visual signals in a generalizable manner.
Committee:
Prof. David Held (advisor)
Prof. Jeffrey Ichnowski
Jianren Wang
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: