Why CAN protocol in Automotive System | Why we need CAN Protocol | Need of CAN in Automotive System
Автор: Know about Embedded Systems
Загружено: 2026-01-23
Просмотров: 9
Описание:
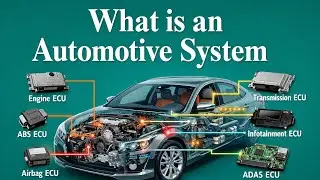
The CAN (Controller Area Network) protocol is used in automotive because it provides a robust, cost-effective, and reliable way for a car's numerous Electronic Control Units (ECUs) to communicate, reducing complex wiring, enabling real-time data exchange for critical systems like brakes and airbags, and allowing for flexibility and scalability as vehicle technology evolves.
Key reasons for CAN in automotive:
Reduced Wiring & Cost: Replaces complex, heavy wiring harnesses with a simple two-wire bus, saving weight and manufacturing costs.
Reliability & Safety: Designed to be fault-tolerant and robust, ensuring critical systems (like brakes, airbags, engine management) work reliably.
Real-Time Communication: Enables fast, efficient data exchange between ECUs, crucial for immediate responses in dynamic driving situations.
Data Prioritization: Uses arbitration to ensure high-priority messages (like braking info) get through immediately, even when the network is busy.
Scalability & Flexibility: Allows manufacturers to easily add new features and ECUs (like advanced driver-assistance systems) without major redesigns.
Centralized Control: Enables a distributed control system where different ECUs can share information and make decisions without a central host computer.
If you have any questions please write to us
email: [email protected],
[email protected]
for courses related to Embedded System, Automotive and RTOS
contact : 8073162262
#CANProtocol #CANBus #ControllerAreaNetwork #CANCommunication #CANNetworking #AutomotiveElectronics #AutomotiveEmbedded #ECU #VehicleNetworking #WhyCANinAutomotiveSystem #AutomotiveSystem
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: