Teste de Funcionamento: EEZYbotARM MK2
Автор: Eduardo Paglioni Salama
Загружено: 2016-07-08
Просмотров: 83707
Описание:
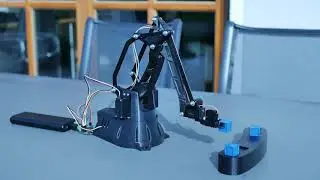
Teste de Funcionamento de um braço robótico modelo desenvolvido por eezyrobots, modelo MK2, impresso em uma impressora 3D Reprap Prusa i3 Personalizada, com filamento PLA.
Todo o corpo foi impresso em PLA com uma impressora Reprap.
Toda eletrônica é controlada por uma placa Arduino, Servo Motores e Potenciômetros.
Link do projeto para impressão e lista de materiais:
http://www.thingiverse.com/thing:1454048
Link para o tutorial de montagem:
http://www.eezyrobots.it/eba_mk2.html
Link para o esquema de ligação da eletrônica:
http://goo.gl/ox37y6
É necessário incluir o quarto Servo Motor no Pino 5 Digital PWM~ e o quarto potenciômetro no pino analógico A3.
Código Fonte:
#include "Servo.h" //biblioteca para controle do servomotor
//Criando objeto da classe Servo
Servo servoMotor1Obj; //para controlar o servo 1
Servo servoMotor2Obj; //para controlar o servo 2
Servo servoMotor3Obj; //para controlar o servo 3
Servo servoMotor4Obj; //para controlar o servo 4
//pinos analógicos dos potenciômetros
int const potenciometro1Pin = 0; //potenciômetro 1
int const potenciometro2Pin = 1; //potenciômetro 2
int const potenciometro3Pin = 2; //potenciômetro 3
int const potenciometro4Pin = 3; //potenciômetro 4
//pino digital associado ao servomotor
int const servoMotor1Pin = 5; //controle do servomotor 1
int const servoMotor2Pin = 4; //controle do servomotor 2
int const servoMotor3Pin = 3; //controle do servomotor 3
int const servoMotor4Pin = 2; //controle do servomotor 4
//variáveis usadas para armazenar o valor lido nos potenciômetros
int valPotenciometro1; //potenciômetro 1
int valPotenciometro2; //potenciômetro 2
int valPotenciometro3; //potenciômetro 3
int valPotenciometro4; //potenciômetro 4
//variáveis para armazenar os valores em graus dos servomotores
int valServo1; //servomotor 1
int valServo2; //servomotor 2
int valServo3; //servomotor 3
int valServo4; //servomotor 4
void setup() {
//associando o pino digital ao objeto da classe Servo
servoMotor1Obj.attach(servoMotor1Pin); //Servo 1
servoMotor2Obj.attach(servoMotor2Pin); //Servo 2
servoMotor3Obj.attach(servoMotor3Pin); //Servo 3
servoMotor4Obj.attach(servoMotor4Pin); //Servo 4
}
void loop()
{
//lendo os valores dos potenciômetros
//o (intervalo do potenciômetro é entre 0 e 1023)
valPotenciometro1 = analogRead(potenciometro1Pin);
valPotenciometro2 = analogRead(potenciometro2Pin);
valPotenciometro3 = analogRead(potenciometro3Pin);
valPotenciometro4 = analogRead(potenciometro4Pin);
//mapeando os valores dos potenciômetros para a escala
//do servo (intervalo entre 5 e 175 graus)
valServo1 = map(valPotenciometro1, 0, 1023, 115, 175);
valServo2 = map(valPotenciometro2, 0, 1023, 70, 175);
valServo3 = map(valPotenciometro3, 0, 1023, 5, 175);
valServo4 = map(valPotenciometro4, 0, 1023, 79, 130);
//definindo o valor/posição dos servomotores em graus
servoMotor1Obj.write(valServo1);
servoMotor2Obj.write(valServo2);
servoMotor3Obj.write(valServo3);
servoMotor4Obj.write(valServo4);
delay(15);
}
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: