Flight Simulation Using DroneKit on Ardupilot (Fixed Pymavlink Bug)
Автор: Rafi Hoque
Загружено: 2025-05-08
Просмотров: 533
Описание:
DroneKit is a popular python package that allows you to program your drone using a low latency link. Flight controllers are limited to make artificial perception or intelligence based decisions. In this perspective, DroneKit adds intelligence to vehilcle's behaviour and perform tasks that are computationally intensive or time-sensitive (for example, computer vision, path planning, or 3D modelling). It is compatible with vehicles that communicate using the MAVLink protocol (including most vehicles made by 3DR and other members of the DroneCode foundation). It runs on Linux, Mac OS X, or Windows.
For more information, check the following link: https://dronekit-python.readthedocs.i...
My Environment:
1. Python 3.9
2. DroneKit 2.9.2
3. DroneKit - SITL 3.3.0
4. MAVProxy 1.8.71
5. Pymavlink 2.4.43
Step: 01: Install the required packages:
pip install dronekit dronekit-sitl mavproxy
Step: 02: Fix the bug with Pymavlink:
a. Go to your site packages and open pymavlink folder
b. Open pymavutil.py file
c. Find the fucntion set_mode_apm and Comment out the following section:
self.mav.command_long_send(self.target_system,
self.target_component,
mavlink.MAV_CMD_DO_SET_MODE,
0,
mavlink.MAV_MODE_FLAG_CUSTOM_MODE_ENABLED,
mode,
0,
0,
0,
0,
0)
d. Replace it by the following section and save the file:
self.mav.set_mode_send(self.target_system,
mavlink.MAV_MODE_FLAG_CUSTOM_MODE_ENABLED,
mode,
)
Step: 03: Open a new terminal and run: dronekit-sitl copter --home=23.4613785,91.1767227,10,270
Step: 04: Open another new terminal and run: python3.9 -m MAVProxy.mavproxy --master tcp:127.0.0.1:5760 --sitl 127.0.0.1:5501 --out 127.0.0.1:14550 --out 127.0.0.1:14551 --out 127.0.0.1:14552
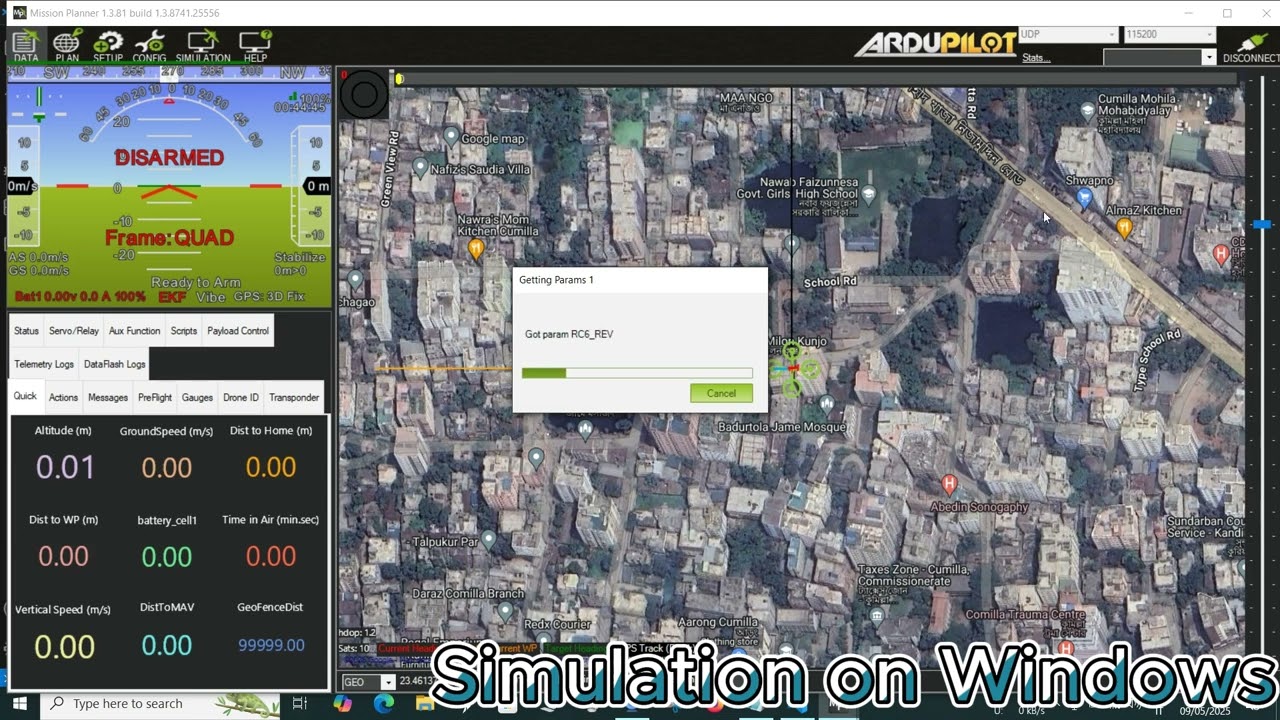
Step: 05: Connect Ardupilot on the UDP link and run the pyscript to check the simulation.
Quadcopter Specifications:
1. S500 Quadcopter Frame.
2. Radiolink Pixhawk Flight Controller.
3. Radiolink SE100 M10N GPS.
4. FlySky FS-i6S Radio Transmitter with FS-iA10B Receiver.
5. HTIRC Hummingbird Dshot 20A ESC.
6. DJI 2212/920KV BLDC Motors.
7. 3S 60C 3200mAh Lipo Battery.
8. 4S 40C 4000mAh SAMSUNG(Original) 21700 Li-Ion Battery Pack (Custom Made).
9. DJI 1045 10" Self Locking Propeller.
10. Imax B6 AC 80W Charger.
11. ESP8266 Based WiFi Telemetry.
12. Cell Checker.
Chapters:
0:00 - Introduction
2:19 - Required Packages
5:14 - Fixing Pymavlink BUG
10:05 - Running Simulation on Windows
17:33 - Running Simulation on Linux Termimnal
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: