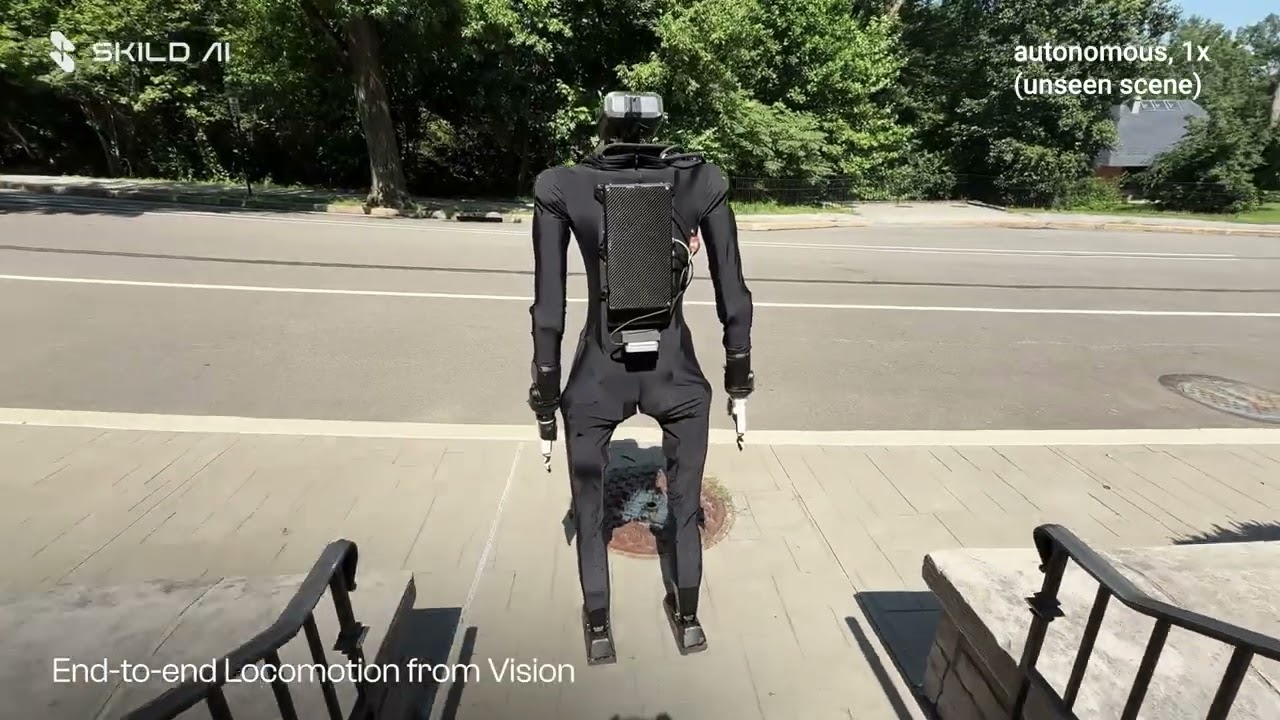
Humanoid taking a stroll in a park full of stairs
Автор: Skild AI
Загружено: 2025-08-06
Просмотров: 2937
Описание:
Full Video: • One Model, Any Scenario: End-to-end Locomo...
We’ve seen humanoid robots perform impressive acrobatics, like cartwheels, backflips, and even complex dance routines, for decades. Yet, hardly any can reliably climb any type of staircase or difficult obstacles (like stepping stones) in the wild. This is a classic example of Moravec’s Paradox: things that come easily to humans are hard for robots and vice versa.
Stair climbing, for instance, demands intricate coordination between visual perception and motor control. The robot must interact precisely with the physical structure of the stairs, adapting dynamically to variations in step height and geometry. In contrast, acrobatics and dancing are typically performed in free space and can often be executed blind without any visual input, relying solely on proprioception and internal motor sensing.
Join us in our mission to build the robot brains of tomorrow.
More details here: https://www.skild.ai/blogs/one-policy...
Apply here: https://www.skild.ai/career
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: