Chp04 04E Communication-CAN-EtherNet (Podcast)
Автор: Roger Chen
Загружено: 2026-02-26
Просмотров: 0
Описание:
Global Automotive Technology Development Trends
4. Evolution of Electronic and Electrical Architecture & Hardware
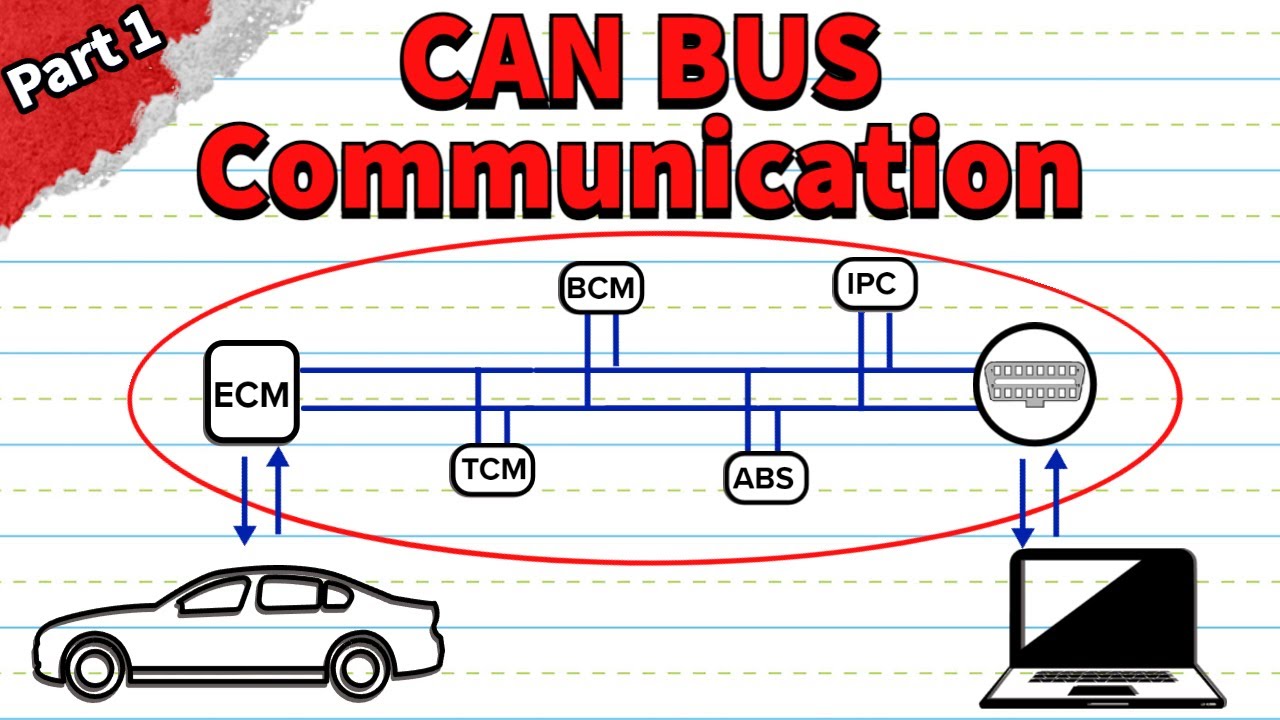
4.4 Communication-CAN-EtherNet
To support the massive data transmission of central computing architectures, in-vehicle network bandwidth has experienced exponential growth. In the backbone connecting various area controllers and HPCs, Automotive Ethernet combined with Time-Sensitive Networking (TSN) has become an irreplaceable standard. Its transmission rates have jumped from the early 100BASE-T1 to gigabit (1Gbps) and even multi-gigabit (2.5G/5G/10G) levels, ensuring the absolute low latency and time determinism required for high-resolution radar/LiDAR sensor data, lossless image streams, and OTA (Over-The-Air) big data transmission .
However, in the edge regions, end effectors, and cost-sensitive drive and body control domains, it is not economically viable to equip each node with an expensive Ethernet PHY chip. To address this, the next-generation CAN XL technology was developed. CAN XL increases the data segment transmission rate of traditional CAN networks to 10-20 Mbps and supports data lengths of up to 2048 bytes.This groundbreaking specification allows CAN XL to directly encapsulate and transmit standard Ethernet IP packets, becoming a perfect bridge between traditional CAN/CAN FD end-point networks and high-speed Ethernet backbones.This allows automakers to achieve IP-based and service-oriented communication at the vehicle's core without fully bearing the high hardware costs of Ethernet.Meanwhile , IEEE 10BASE-T1S (10 Mbps multi-node single-pair Ethernet) is also gaining popularity as a strong competitor in China and among some new car manufacturers that value pure software- defined architectures.
--------------------------------------------------------------------------
Global Automotive Technology Development Trends
Table of contents:
1. Policies, Regulations and Carbon Neutrality Transition Pathways
1.1 AECC
2. Euro 7 and Extreme Emissions Regulation: The Era of Non-Exhaust Pollution and Onboard Monitoring
2.1 Euro 7 – Emission
2.2 EMC
2.3 NVH
2.4 Manufacture-Recycle
3. Diversification of power system technologies and energy transition
3.1 Battery
3.2 BMS
3.3 Motor-MCU
3.4 Inverter
3.5 OBC-Charger
3.6 H2ICE-Fuel Cell
3.7 Thermal Management
4. Evolution of Electronic and Electrical Architecture & Hardware
4.1 EE
4.2 CPU-Sensors
4.3 X-in-1
4.4 Communication-CAN-EtherNet
5. The Evolution of Software-Defined Vehicles (SDV) and the Transfer of Engineering Paradigms
5.1 SDV
5.2 AutoSar
5.3 ASPICE
5.4 Software-Linux
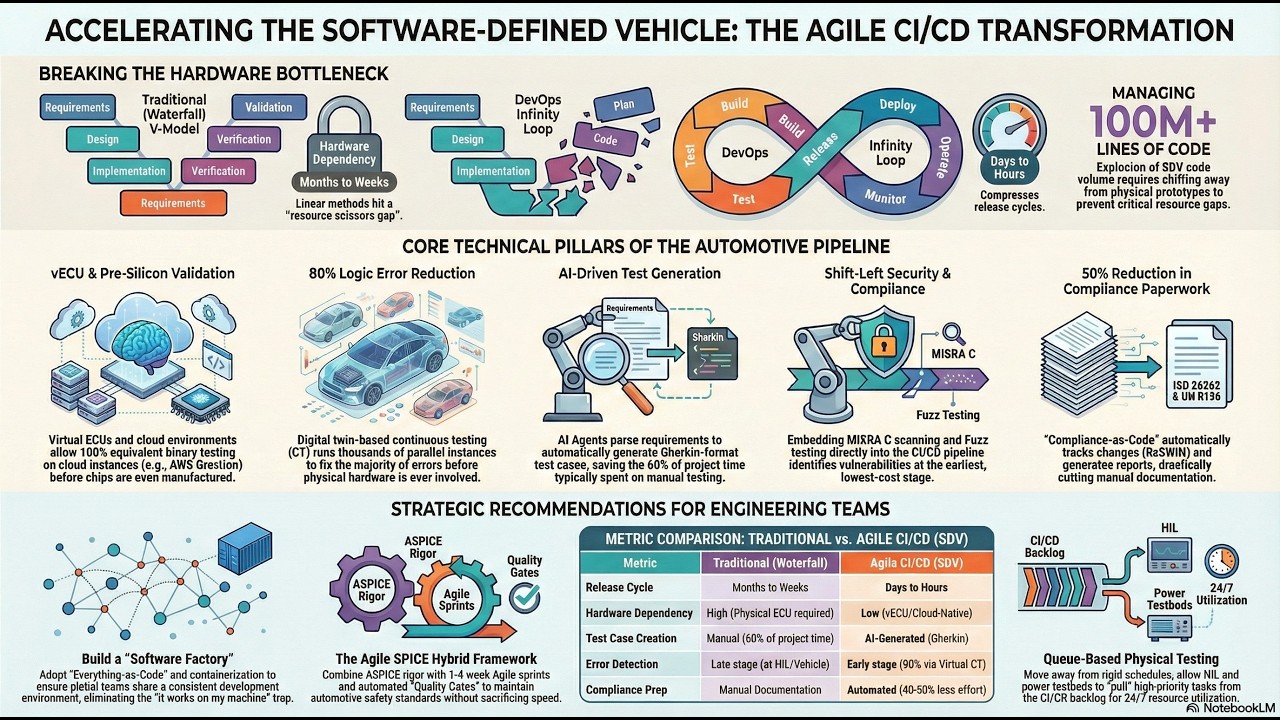
5.5 Agile Development (Agile CI/CD)
5.6 Design-CAE
5.7 Validation
5.8 Testing
5.9 Digital Twin-Zero Prototype
6. The Hierarchical Differentiation and Commercialization Model of Autonomous Driving
6.1 ADAS
7. Artificial Intelligence (AI) Empowerment
7.1 AI
8. The Perception Revolution in Smart Cockpits
8.1 CockPit
8.2 IVI
8.3 HMI
9. Strategic barriers to safety, security, and compliance
9.1 NCAP
9.2 Functional Safety
9.3 Expected Functional Safety (SOTIF)
9.4 Fail Operational
9.5 ISO-PAS 8800
9.6 CyberSecurity
9.7 NIS 2 (Network and Information Systems Security Directive)
10. Foresight Key Materials
10.1 Material
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: