Скачать
ICRA 2017 - "A friction model for curved contact area"
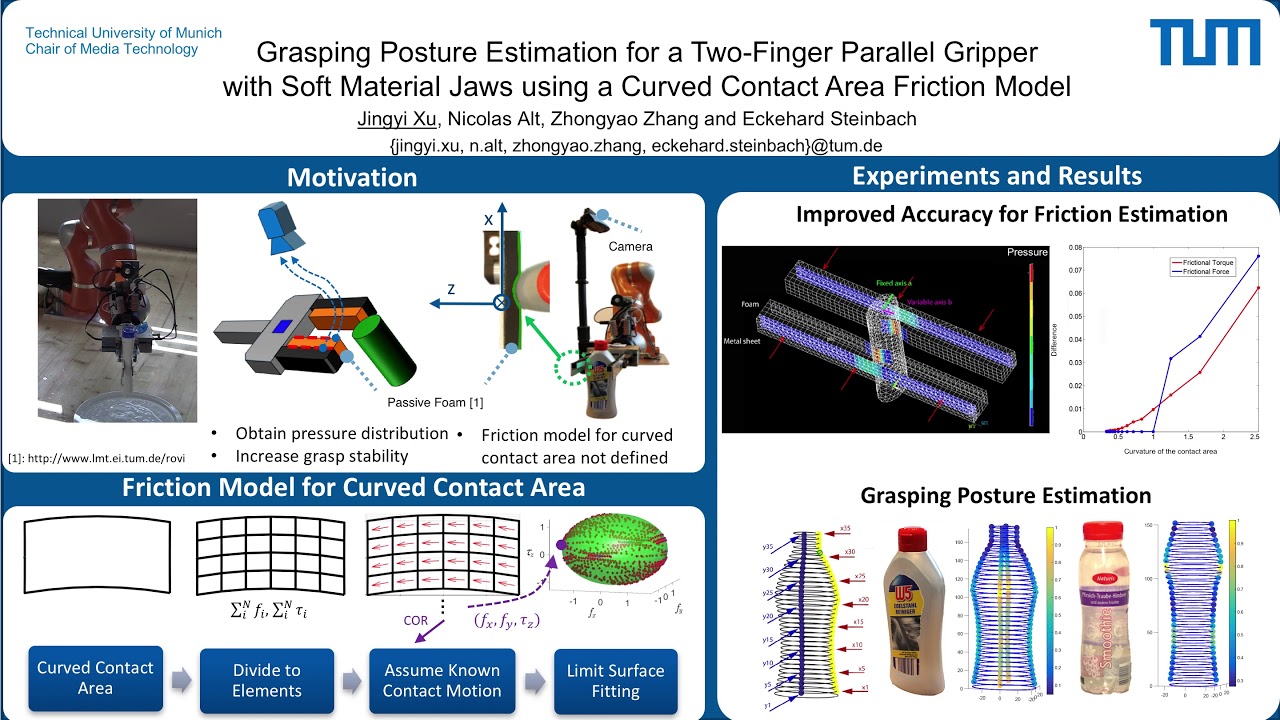
Автор: Jingyi Xu
Загружено: 2018-08-01
Просмотров: 92
Описание: Poster for J.Xu, N. Alt, Z. Zhang, and E, Steinbach, "Grasping Posture Estimation for a Two-Finger Parallel Gripper with Soft Material Jaws using a Curved Contact Area Friction Model", 2017 IEEE International Conference on Robotics and Automation (ICRA). Visit http://www.jingyixu.com/ for more information.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















