Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05)
Автор: Robotica de Colombia
Загружено: 2026-01-08
Просмотров: 54
Описание:
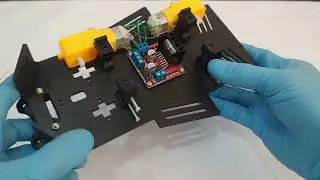
En este tutorial paso a paso del Carro Robot TurboBot 4x4 (Arduino) instalamos el sensor QTR-8A (seguidor de línea) en la base del chasis, dejándolo alineado y a la altura correcta para que más adelante puedas hacer calibración y programación sin dolores de cabeza.
Si estás construyendo un carro seguidor de línea “de verdad”, este video es clave porque aquí se define:
• Posición y centrado del QTR-8A (para lecturas estables)
• Altura correcta del sensor respecto al piso (evita falsos positivos)
• Montaje firme + organización de cables (sin vibraciones ni roces)
Siguiente en la serie TurboBot (E06):
• Conexión del sensor a Arduino + lectura de valores
• Calibración del QTR-8A y base para el código seguidor de línea
Consigue el TurboBot y repuestos en la tienda oficial:
roboticadecolombia.com (busca “TurboBot”)
Soporte/ventas WhatsApp: +57 320 263 0996
Capítulos (tabla de contenidos)
00:00 Introducción + objetivo (QTR-8A en la base)
00:12 Qué es el QTR-8A y para qué sirve (seguidor de línea)
00:28 Ubicación ideal en el chasis (centrado y orientación)
00:50 Montaje del sensor en la base (fijación y tornillería)
01:20 Ajuste de altura y alineación (lo que evita errores)
01:48 Organización de cables (ruta limpia y segura)
02:03 Resultado final + qué sigue (conexión y programación)
#TurboBot #Arduino #QTR8A #SeguidorDeLinea #RoboticaEducativa #RoboticaDeColombia
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: