Unstructured Terrain Navigation and Topographic Mapping with a Low-cost Mobile Cuboid Robot
Автор: ScazLab Yale (Social Robotics Lab)
Загружено: 2019-07-18
Просмотров: 31
Описание:
IEEE International Conference on Intelligent Robots (IROS) 2019
Andrew Morgan*, Robert Baines*, Hayley McClintock, and Brian Scassellati
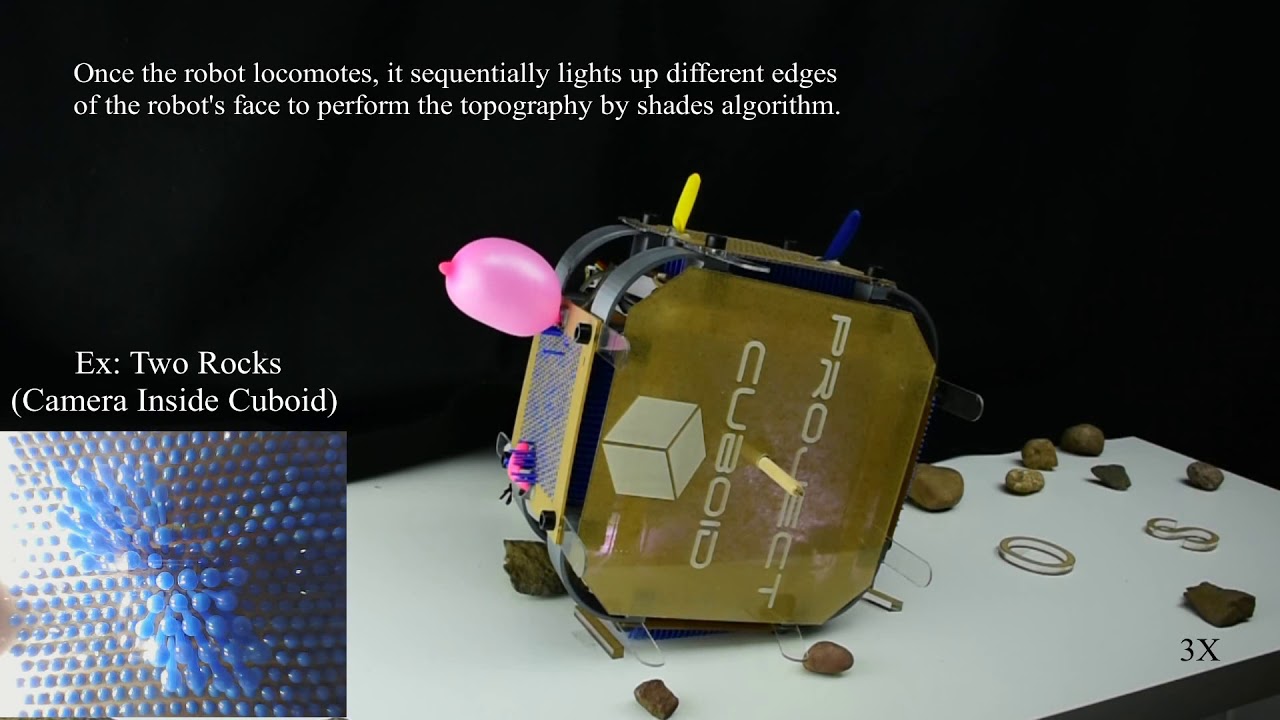
Abstract: Current robotic terrain mapping techniques require expensive sensor suites to construct an environmental representation. In this work, we present a cube-shaped robot that can roll through unstructured terrain and construct a detailed topographic map of the surface that it traverses in real time with low computational and monetary expense. Our approach devolves many of the complexities of locomotion and mapping to passive mechanical features. Namely, rolling movement is achieved by sequentially inflating latex bladders that are located on four sides of the robot to destabilize and tip it. Sensing is achieved via arrays of fine plastic pins that passively conform to the geometry of underlying terrain, retracting into the cube. We developed a topography by shade algorithm to process images of the displaced pins to reconstruct terrain contours and elevation. We experimentally validated the efficacy of the proposed robot through object mapping and terrain locomotion tasks.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: