Online Reinforcement Learning Based Real-time Robust Adaptive Control Design for Robot Manipulators
Автор: Andrew Pham
Загружено: 2025-10-31
Просмотров: 22
Описание:
International Journal of Control, Automation, and Systems
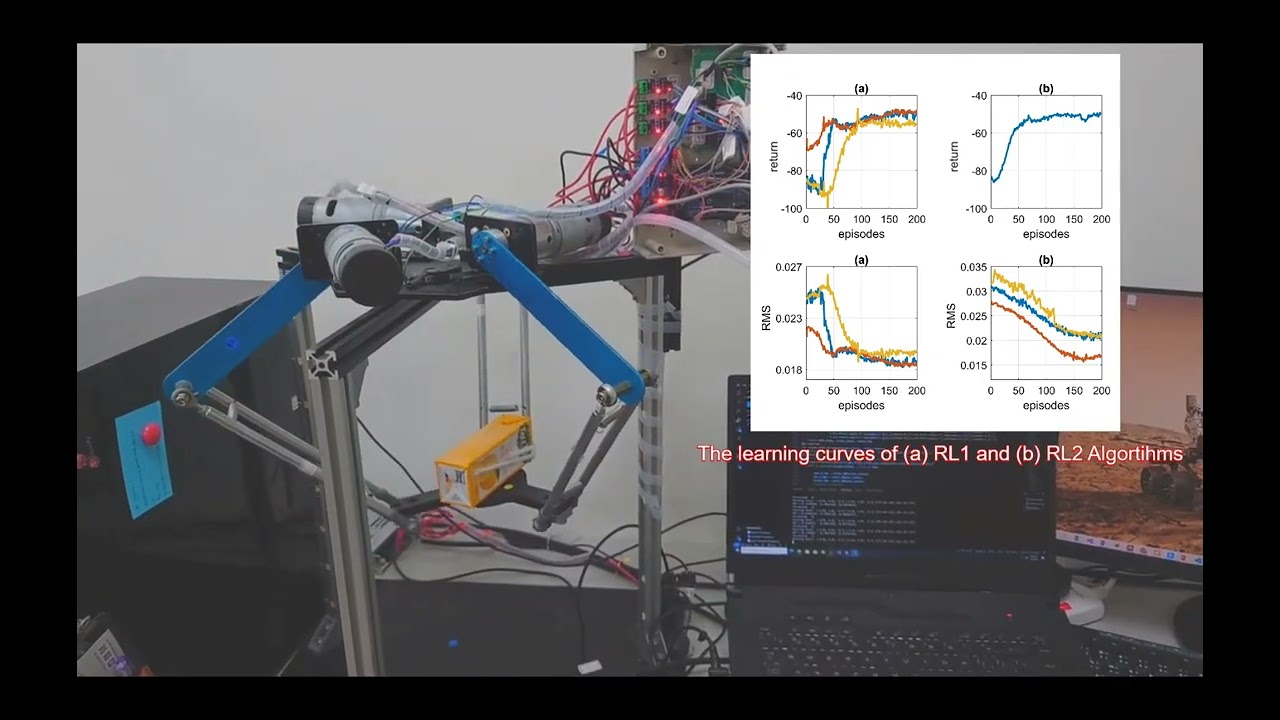
Abstract: Robust and adaptive control of robotic manipulators is critical for managing uncertainties and disturbances. Traditional control methods often lack adaptability to varying dynamic conditions, necessitating advanced approaches that ensure stability and performance. This paper presents two reinforcement learning (RL) schemes designed to enhance the robustness and adaptability of a robotic manipulation system using both model-based and model-free control approaches. Both RL algorithms are optimized for real-time implementation and safety, showcasing their feasibility in practical robotic applications
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: