Optimal Trajectory Planning for Orbital Robot Rendezvous and Docking
Автор: Space Robotics Lab
Загружено: 2026-01-05
Просмотров: 100
Описание:
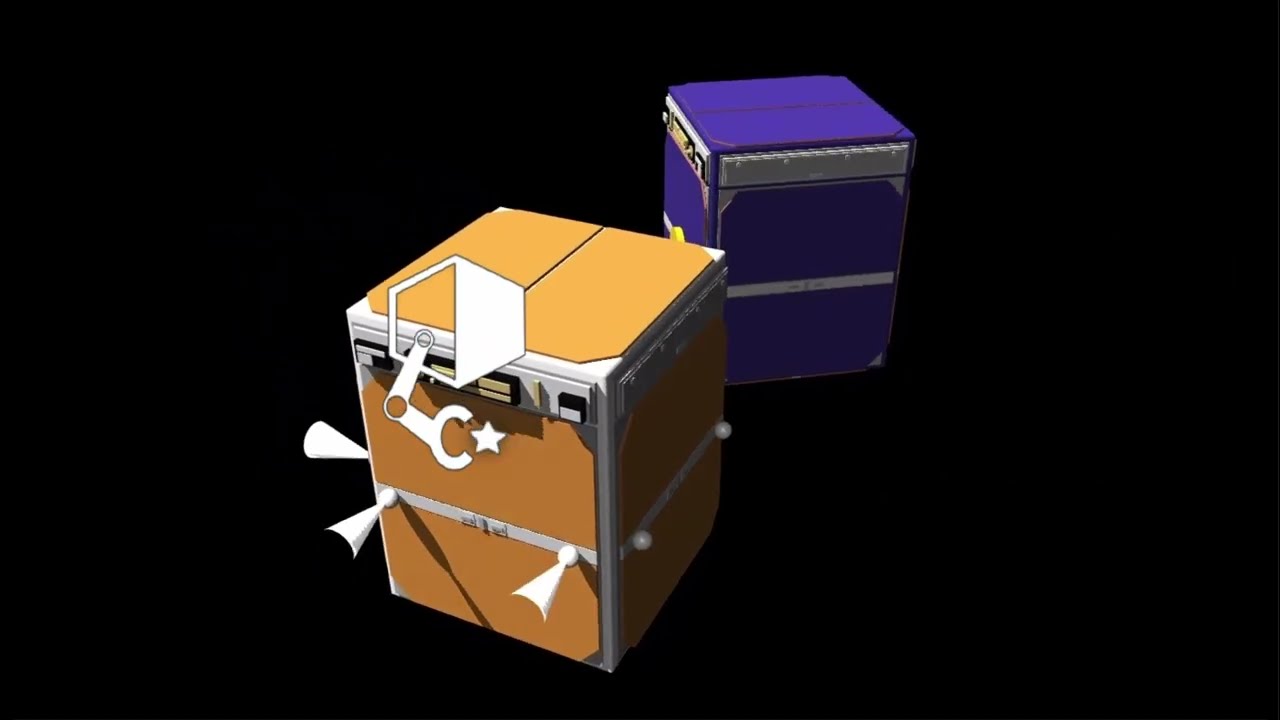
Approaching a tumbling target safely is a critical challenge in space debris removal missions utilizing robotic manipulators onboard servicing satellites. In this work, we propose a trajectory planning method based on nonlinear optimization for a close-range rendezvous to bring a freefloating, rotating debris object in a two-dimensional plane into the manipulator’s workspace, as a preliminary step for its capture. The proposed method introduces a dynamic keepout sphere that adapts depending on the approach conditions, allowing for closer and safer access to the target. Furthermore, a control strategy is developed to reproduce the optimized trajectory using discrete ON/OFF thrusters, considering practical implementation constraints.
Regular paper accepted to the International Conference on Space Robotics (iSpaRo) 2025, Sendai, Japan.
Paper: https://arxiv.org/pdf/2512.21882
Video by Kenta Iizuka
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:










![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://image.4k-video.ru/id-video/X3uZq2joiW8)







