Скачать
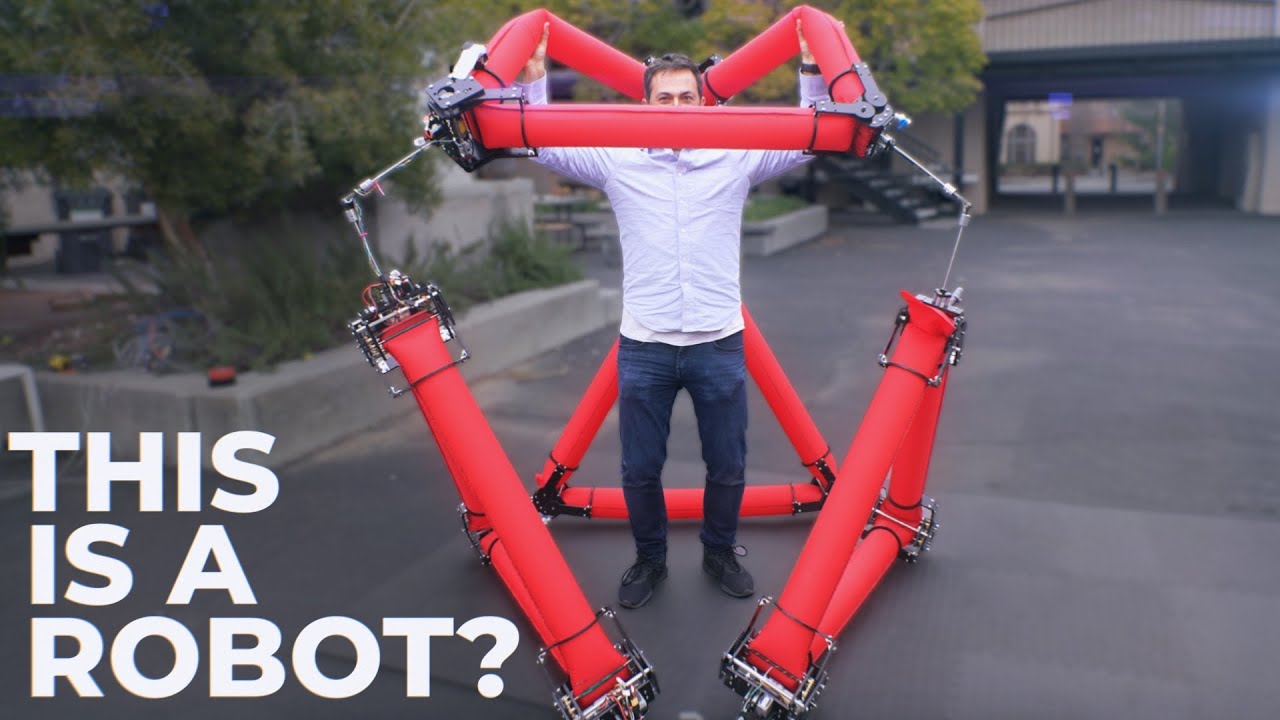
An untethered isoperimetric soft robot
Автор: Stanford SHAPE Lab
Загружено: 2020-04-14
Просмотров: 2878
Описание:
A large-scale, isoperimetric, untethered, soft robot changes shape by manipulating constant-length inflated tubes using movable joints.
More information here: http://shape.stanford.edu/research/is...
Published in the journal Science Robotics: https://robotics.sciencemag.org/conte...
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: