Скачать
5.1 Inverse Kinematics
Автор: Woolfrey
Загружено: 2018-08-06
Просмотров: 76670
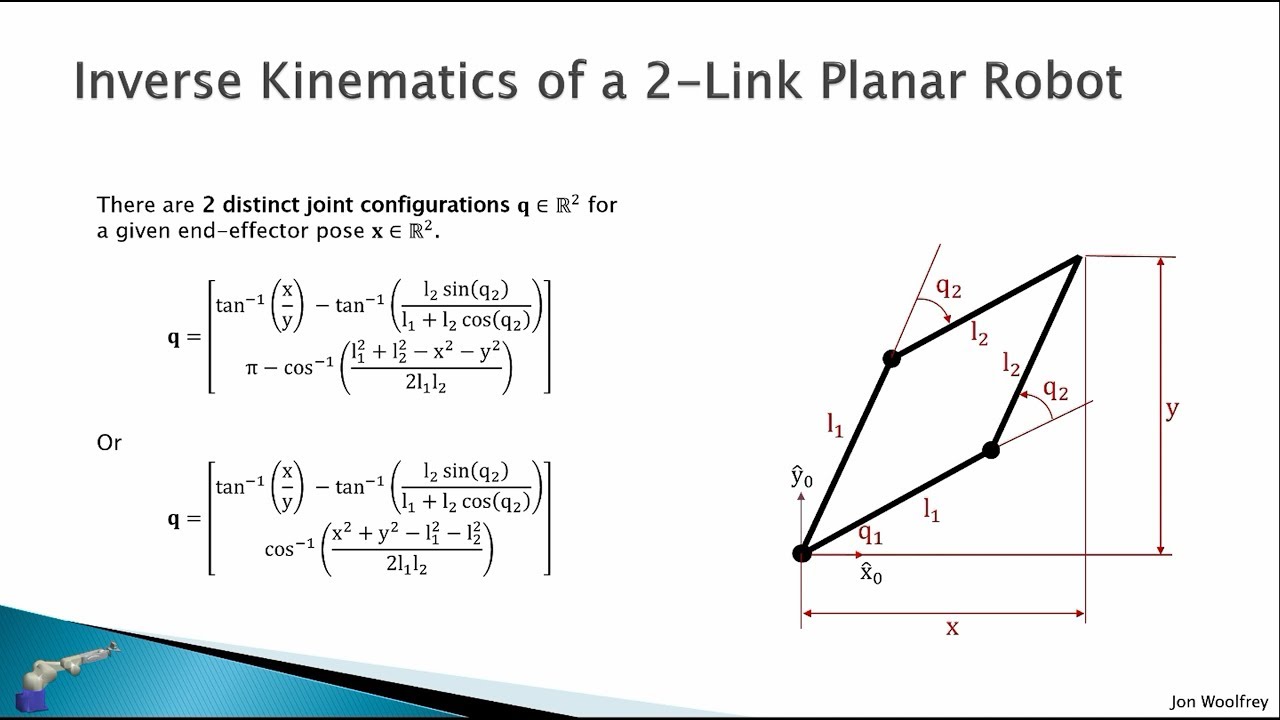
Описание: In this lecture, I introduce the concept of Inverse Kinematics (IK). That is, for a given end-effector pose of the robot we want to find a set of joint solutions that satisfies the kinematics.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















