Скачать
Unitree Go2 Learns to Climb Stairs via Reinforcement Learning | NVIDIA IsaacLab
Автор: Ashutosh Panpalia
Загружено: 2026-01-16
Просмотров: 127
Описание:
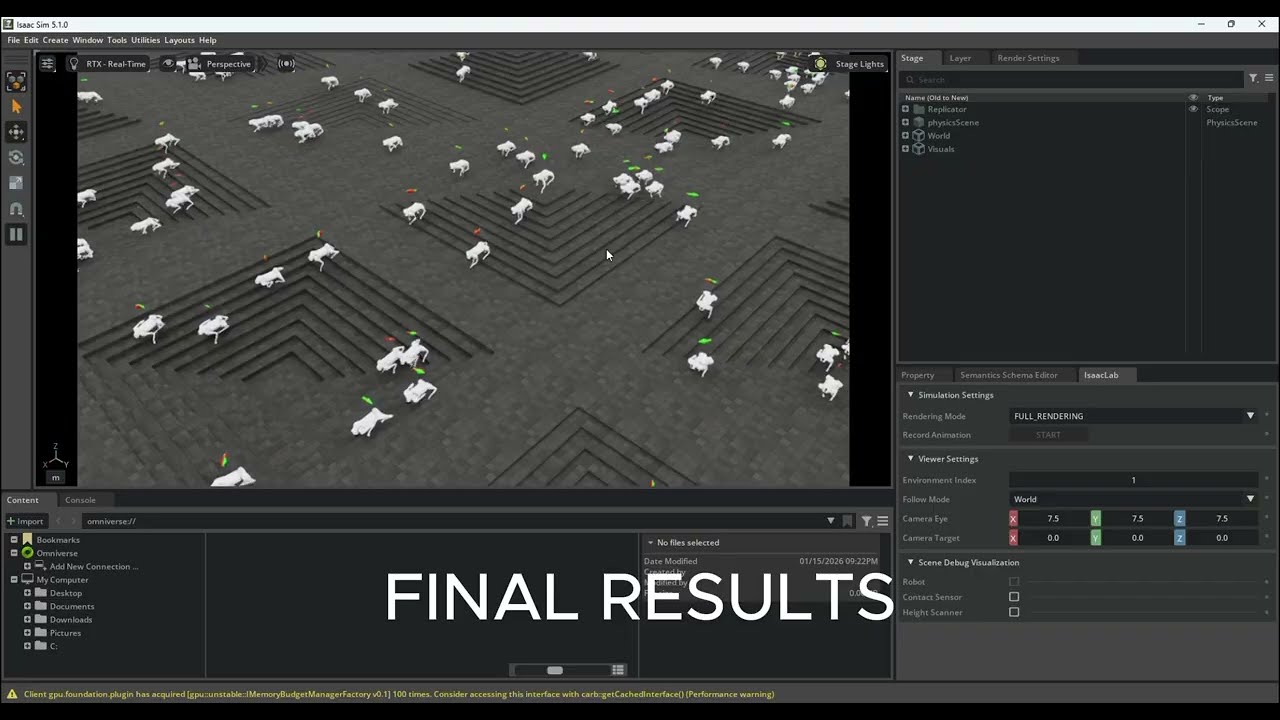
I’m testing NVIDIA IsaacLab to train a reinforcement learning policy for stair ascent and descent on the Unitree Go2 quadruped robot.
This short clip presents results only rather than a step-by-step tutorial.
For more builds and experiments: @ash_builds_robots
Keywords:
Unitree Go2, quadruped robot, robot dog, stair climbing robot, reinforcement learning, RL locomotion, legged robotics, autonomous robot, NVIDIA Isaac Sim, IsaacLab
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:











![[LIVE] Bez litości. Czy rząd Tuska przetrwa? Jan Piński i Tomasz Szwejgiert](https://image.4k-video.ru/id-video/YQeX9ZJtbss)







