Скачать
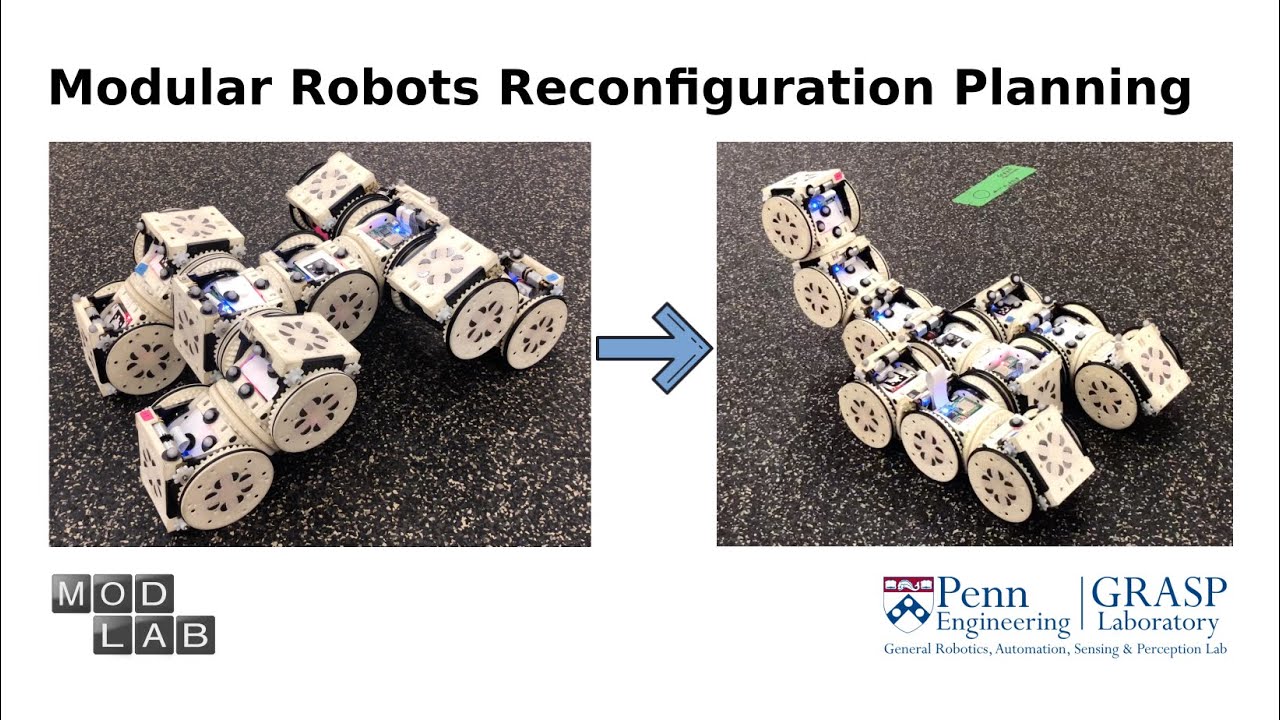
A Distributed Reconfiguration Planning Algorithm for Modular Robots
Автор: Modlab UPenn
Загружено: 2019-07-22
Просмотров: 13696
Описание: Self-reconfigurable modular robots are usually composed of multiple modules with uniform docking interfaces that can be transformed into different configurations by themselves. The reconfiguration planning problem is finding what sequence of reconfiguration actions are required for one arrangement of modules to transform into another. We present a novel reconfiguration planning algorithm for modular robots. More details can be found here: https://www.modlabupenn.org/2019/07/2...
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:





![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)













