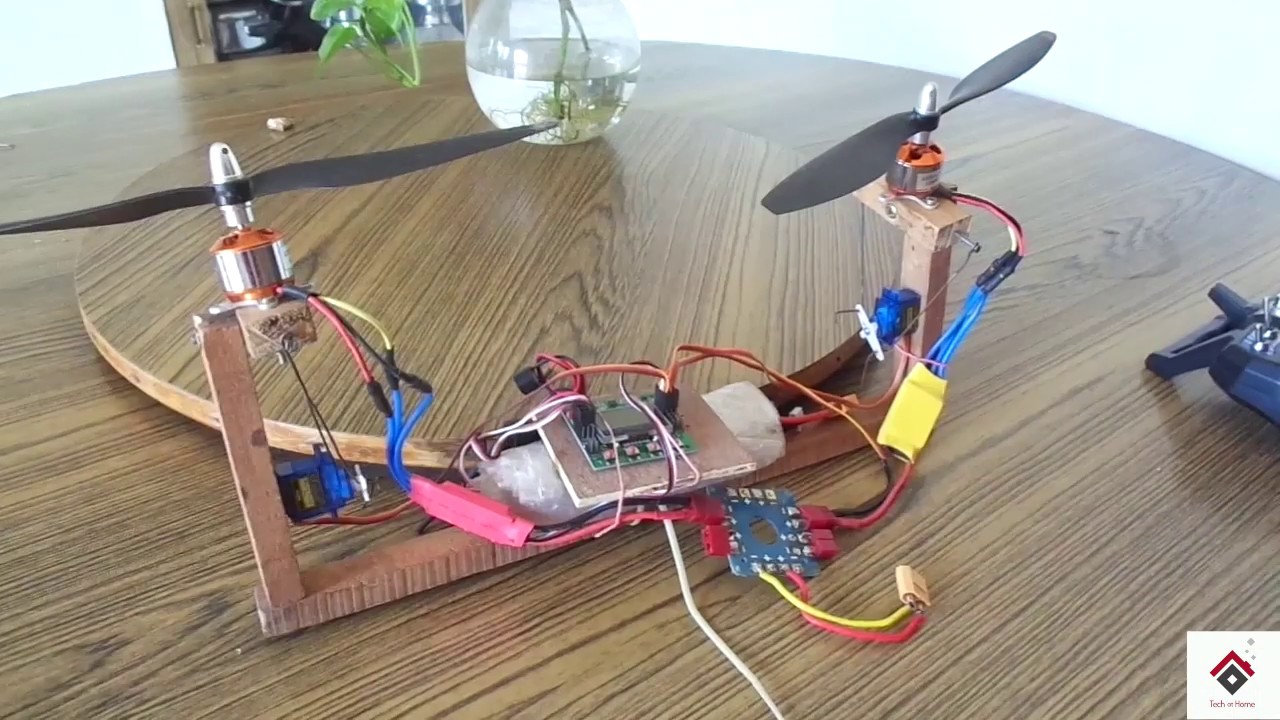
Bicopter Build part 2 : Betaflight Setup
Автор: Naruepong Kanjanapa
Загружено: 2018-10-05
Просмотров: 18259
Описание:
6 ขา 4 ขา 3 ขา ก็ทำไปแล้ว มาลองทำ 2 ขาดูมั่งครับ มีสองตอนนะครับ
ตอนที่ 1/Part 1 : • Bicopter Build part 1 : มาทำสองขากันครับ
Betaflight 3.5 Setup Video : • โปรเจค Long Range ครับ LR300 My Long Range...
Blheli Configurator Video : • Blheli Configurator - Standalone Download ...
Resource Mapping Video : • มาทำความรู้จักกับ resource mapping บนบอร์ด...
Wiring Diagram http://www.rcthai.club/board/index.ph...
แรงบันดาลใจ : https://rcexplorer.se/
Spec
FC+PDB : Matek System F411-Mini : http://bit.ly/2OQxKOA
Motor : Racerstar Racing Edition 2205 BR2205 2600KV : http://bit.ly/2DrSwmr
ESC : Racerstar RS30A V2 : http://bit.ly/2OP5Imz
Servo : EMAX ES09MD : http://bit.ly/2QW48AS
Radio : FrSky Taranis X-LITE : http://bit.ly/2R1yMJb
Receiver : Frsky XSR : http://bit.ly/2qeIzj0
My Setup
resources
resource BEEPER 1 B02
resource MOTOR 1 B04
resource MOTOR 2 B05
resource SERVO 1 B06
resource SERVO 2 B07
resource SERIAL_TX 11 B03
feature
feature RX_SERIAL
feature SOFTSERIAL
feature TELEMETRY
feature LED_STRIP
feature ANTI_GRAVITY
master
set acc_trim_pitch = -14
set acc_trim_roll = 0
set rc_smoothing_type = FILTER
set rc_smoothing_input_hz = 0
set rc_smoothing_derivative_hz = 0
set rc_smoothing_debug_axis = ROLL
set rc_smoothing_input_type = BIQUAD
set rc_smoothing_derivative_type = BIQUAD
set min_throttle = 1070
set max_throttle = 2000
set min_command = 1000
set dshot_idle_value = 300
set dshot_burst = OFF
set use_unsynced_pwm = OFF
set motor_pwm_protocol = DSHOT600
set motor_pwm_rate = 480
profile
profile 0
set dterm_lowpass_type = BIQUAD
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set dterm_notch_hz = 260
set dterm_notch_cutoff = 160
set vbat_pid_gain = OFF
set pid_at_min_throttle = ON
set anti_gravity_mode = SMOOTH
set anti_gravity_threshold = 250
set anti_gravity_gain = 4000
set feedforward_transition = 10
set acc_limit_yaw = 100
set acc_limit = 0
set crash_dthreshold = 50
set crash_gthreshold = 400
set crash_setpoint_threshold = 350
set crash_time = 500
set crash_delay = 0
set crash_recovery_angle = 10
set crash_recovery_rate = 100
set crash_limit_yaw = 200
set crash_recovery = OFF
set iterm_rotation = ON
set smart_feedforward = OFF
set iterm_relax = RP
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 50
set iterm_limit = 150
set pidsum_limit = 500
set pidsum_limit_yaw = 400
set yaw_lowpass_hz = 50
set throttle_boost = 5
set throttle_boost_cutoff = 15
set p_pitch = 48
set i_pitch = 37
set d_pitch = 29
set f_pitch = 60
set p_roll = 45
set i_roll = 35
set d_roll = 27
set f_roll = 60
set p_yaw = 38
set i_yaw = 14
set d_yaw = 0
set f_yaw = 60
set p_level = 50
set i_level = 50
set d_level = 75
set level_limit = 55
set horizon_tilt_effect = 75
set horizon_tilt_expert_mode = OFF
set abs_control_gain = 0
set abs_control_limit = 90
set abs_control_error_limit = 20
rateprofile
rateprofile 0
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 110
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 63
set pitch_srate = 63
set yaw_srate = 63
set tpa_rate = 10
set tpa_breakpoint = 1650
set throttle_limit_type = OFF
set throttle_limit_percent = 100
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: