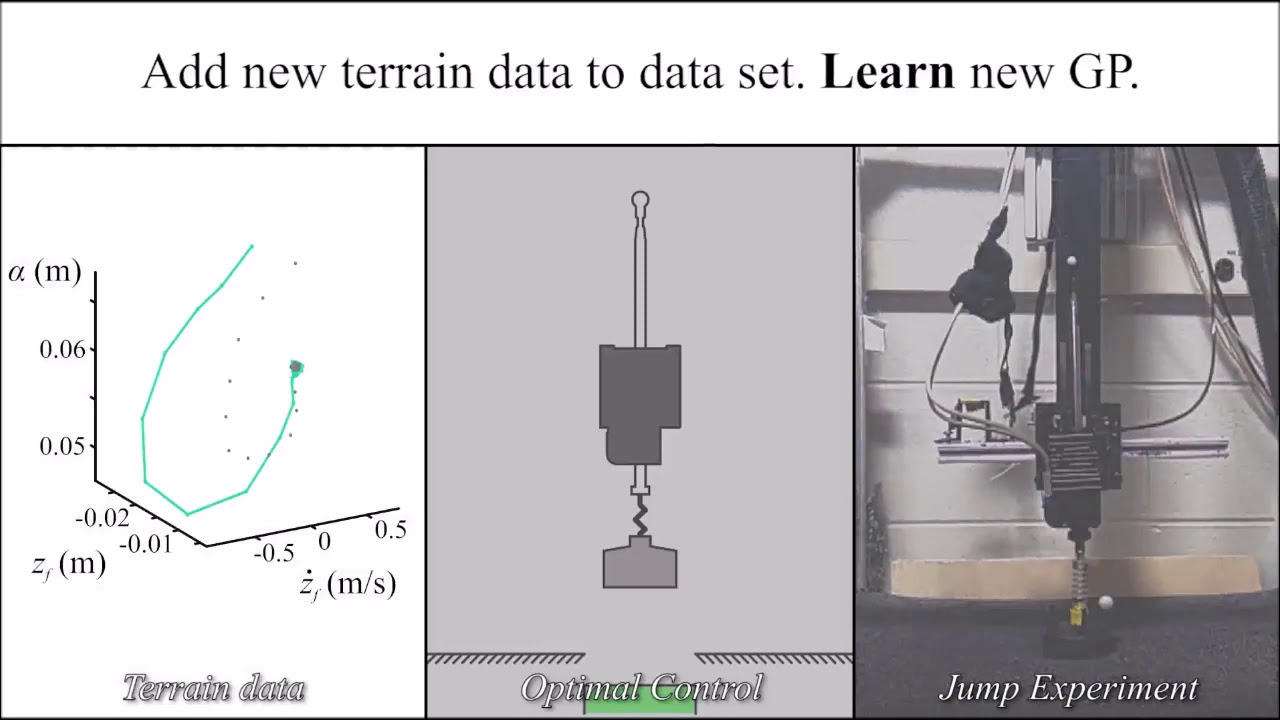
Learning to Jump on Granular Media: Experiments
Автор: IVALab BioLocomotion
Загружено: 2019-11-21
Просмотров: 40
Описание:
Learning to Jump on Granular Media: Experimental Validation of a Gaussian Process Modeling/Optimal Control Adaptation Framework
Related Publication(s):
A. Chang, C. Hubicki, J. Aguilar, D. Goldman, A. Ames, and P. Vela, “Learning terrain dynamics: A Gaussian process modeling and optimal control adaptation framework applied to robot jumping,” submitted to IEEE Transactions on Control Systems Technology, 2019.
A. Chang, C. Hubicki, J. Aguilar, D. Goldman, A. Ames, and P. Vela, “Learning to jump in granular media: Unifying optimal control synthesis with gaussian process-based regression,” May 2017, pp. 2154–60.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: