Скачать
Human Skeletal Tracking - Controlling a Humanoid Robotic Arm
Автор: Michael Toumbas
Загружено: 2013-05-15
Просмотров: 762
Описание:
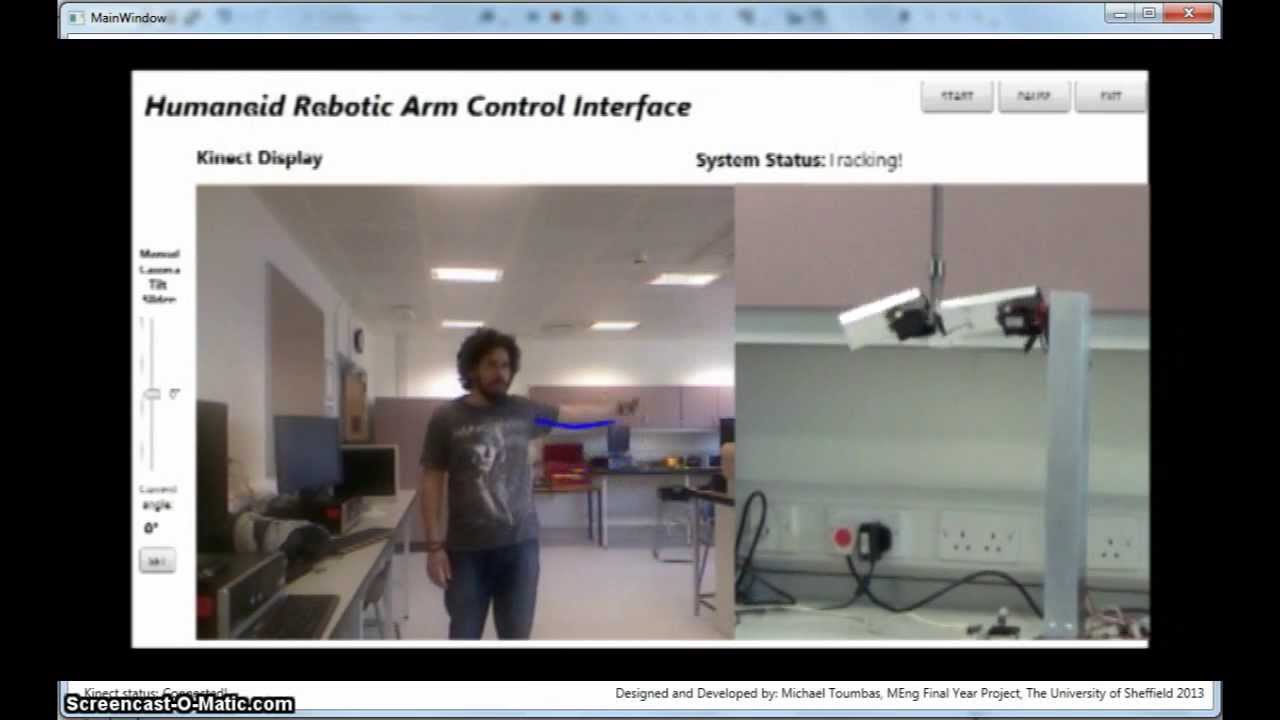
Josh and I demonstrate the system that I have developed for my dissertation while studying my MEng degree in Computer Systems Engineering at the University of Sheffield 2012-2013.
The system utilizes the functions of the Microsoft Kinect - 3D Skeletal Tracking while applying inverse kinematics to control a custom built 4DOF humanoid robotic arm through an Arduino.
The interface was designed in C# while the processes are run by using the Kinect API.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















