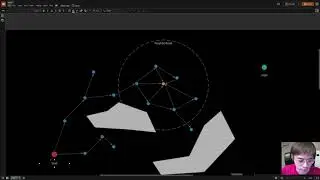
Motion Planning: Rapidly Exploring Random Trees (RRT): Algorithm Implementation Step by Step!
Автор: VDEngineering
Загружено: 2022-09-10
Просмотров: 22191
Описание:
#VDEngineering #motionplanning
~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning:
https://www.udemy.com/course/autonomo...
Resources:
Mathworks RRT video: • Path Planning with A* and RRT | Autonomous...
RRT paper: https://www.cs.csustan.edu/~xliang/Co...
A very good article on RRT by Tim Chinenov (SpaceX): / robotic-path-planning-rrt-and-rrt
You will learn how to implement the well known Rapidly Exploring Random Trees (RRT) algorithm in Python from scratch. I will show you every step including creating the configuration space which will be a binary image along with setting up the grid and finding the generated path. You will also learn how to calculate the length of the trajectory generated by the RRT algorithm along with the number of waypoints and their locations.
There are more advanced versions of the RRT such as RRT*, CL-RRT and RRT# and these will be covered in future videos.
Timestamps:
RRT Intro: 00:45
RRT Explanation: 01:24
Setting up the code: 07:24
Completing the code: 12:50
Running the code: 25:10
Intro Music: Sappheiros - Dawn
Outro Music: Sappheiros - Promise
From: / sappheiros
Thanks for watching!
~~Website: https://www.vinayakd.com/
~~Instagram: / vinayak_desh
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:






![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://image.4k-video.ru/id-video/gP6MRe_IHFo)











