Planning, motion control and simulation of UR10 in ROS2
Автор: Automatic Control Group
Загружено: 2025-05-19
Просмотров: 142
Описание:
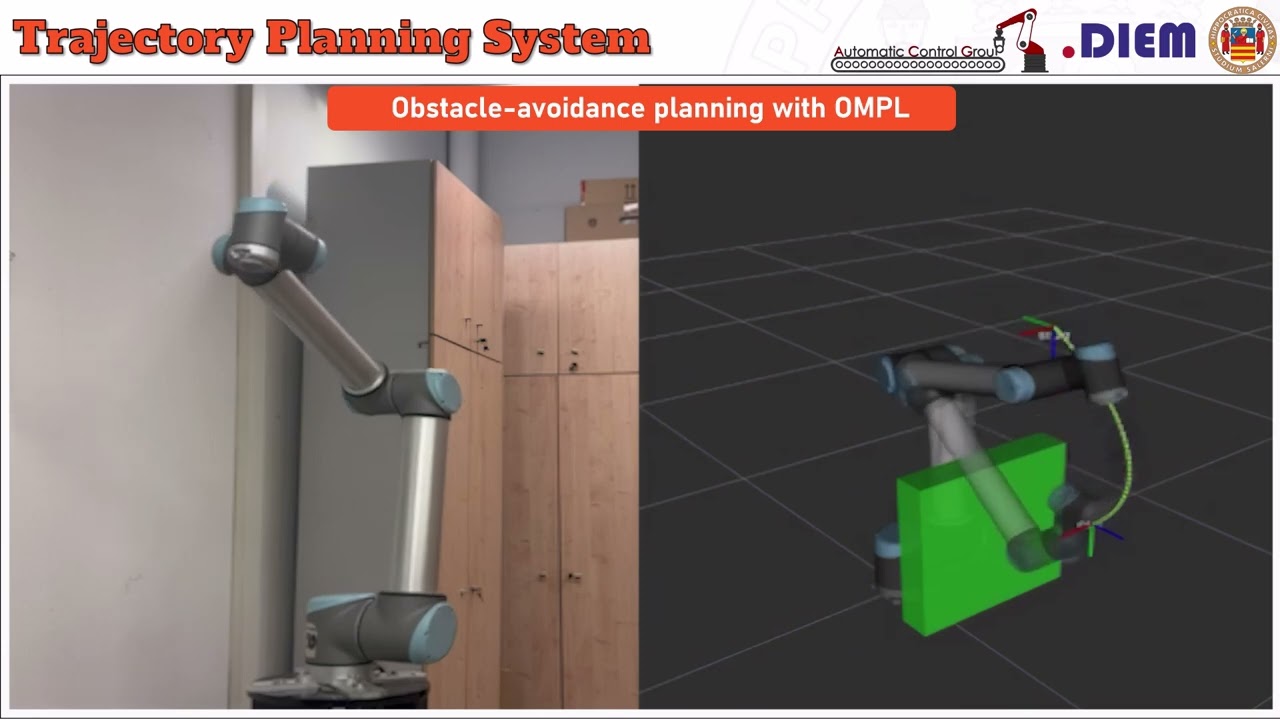
Motion planning and control are fundamental to achieve precision and reliability in robotic manipulation tasks. To this aim, this thesis presents the design and implementation of a complete motion planning and control framework within the ROS2 ecosystem, using the UR10 industrial manipulator as a case study. The proposed system integrates a customized simulation environment based on the official Universal Robots packages and leverages MoveIt!2 for motion planning, evaluating the performance of OMPL and Pilz planners under different scenarios. A key contribution of this work is the development of a model-based nonlinear controller for ros2_control, a gravity-compensated PD controller, exploiting an inverse dynamics solver recently released by the Automatic Control Group. The controller is designed for ease of tuning, and achieves stability and high performance with minimal effort. The entire system is validated through extensive simulations and real-world experiments, including tests under both generic and real-time Linux kernels to assess the impact on trajectory tracking accuracy and system responsiveness.
The video is related to the master thesis:
G. Ricciardelli, "Planning, motion control and simulation in ROS2", A.Y. 2023/2024
Other theses projects: • ACG - Theses
Visit us at: http://www.automatica.unisa.it
Follow our page on LinkedIn: / automatic-control-group
Open-source projects on GitHub: https://github.com/unisa-acg
Timeline:
0:00 Intro
0:05 Trajectory Planning System
0:49 Gravity compensation PD controller - Simulation
1:11 Gravity compensation PD controller - Control Scheme
1:21 Outro
#robot #robotics #ros2 #automation #education #control #controlsystems #engineering #universalrobots
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















