Скачать
Franka Emika — Vision-Guided Grasp-and-Place (Simulation)
Автор: Saif Ahmad
Загружено: 2025-12-23
Просмотров: 4
Описание:
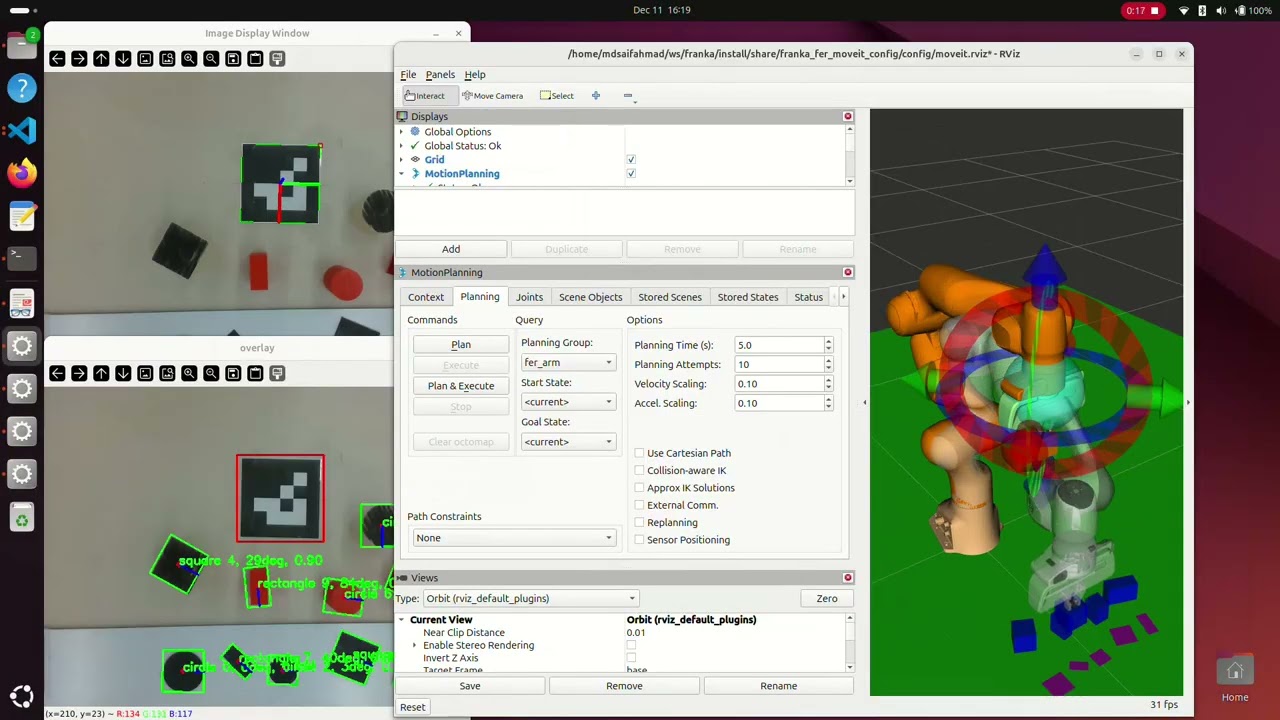
This video showcases a vision-guided grasp-and-place pipeline developed and validated on a Franka Emika Panda, demonstrated in both simulation and real-world hardware.
The system follows an end-to-end perception → planning → execution workflow, where objects are detected using RGB-D perception, localized in 3D, and autonomously grasped and placed using collision-aware motion planning.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















