Скачать
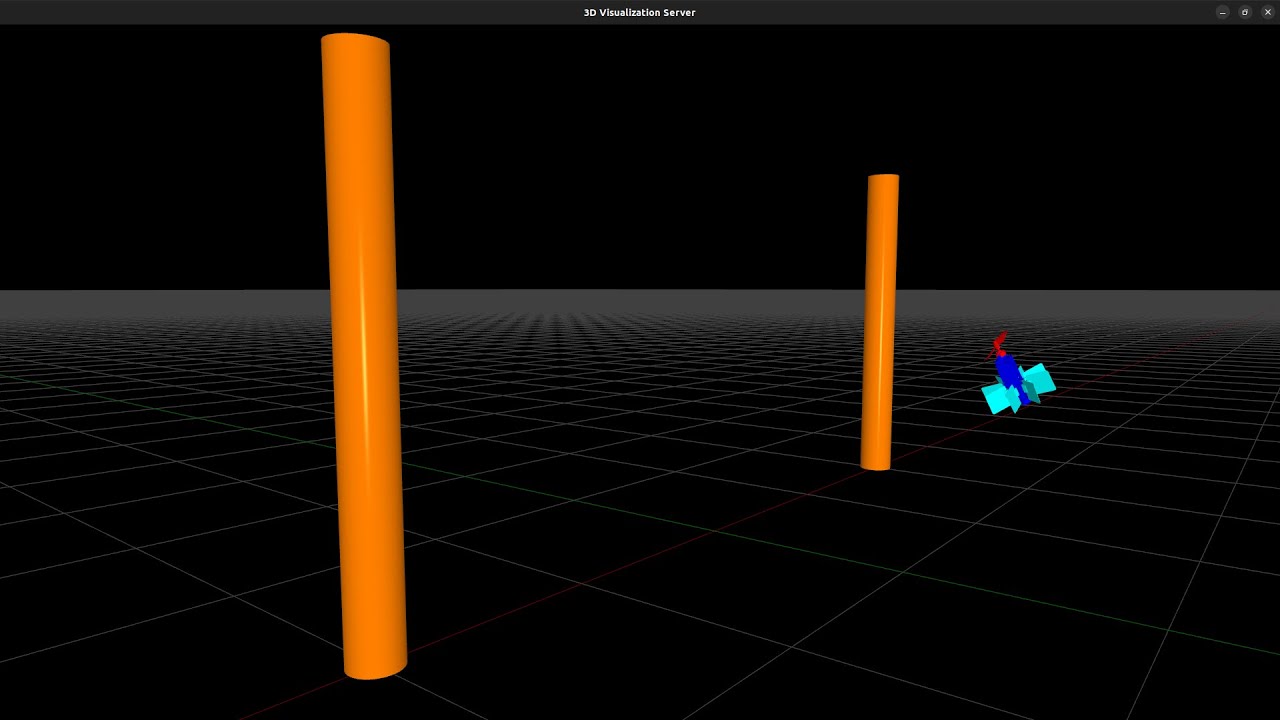
TVC UAV Goose - Trajectory tracking with Partial Feedback Linearization
Автор: Eryk Możdżeń
Загружено: 2024-01-13
Просмотров: 63
Описание:
During last few weeks I developed new simulation written in C++ and I'm not depend on student's licence for Matlab anymore. 3D word is displayed using my graphic server available on my Github:
https://github.com/Eryk-Mozdzen/visua...
For control attitude and altitude currently I'm using controller based on Partial Feedback Linearization well described here:
https://underactuated.mit.edu/acrobot...
For control XY movement PD controller with non-linear reference angle calculation is used.
Project is developed on my Github:
https://github.com/Eryk-Mozdzen/uav-t...
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:







![# 16.01.2026 [2975. Maximum Square Area by Removing Fences From a Field]](https://image.4k-video.ru/id-video/wIicj0TOIEw)