Скачать
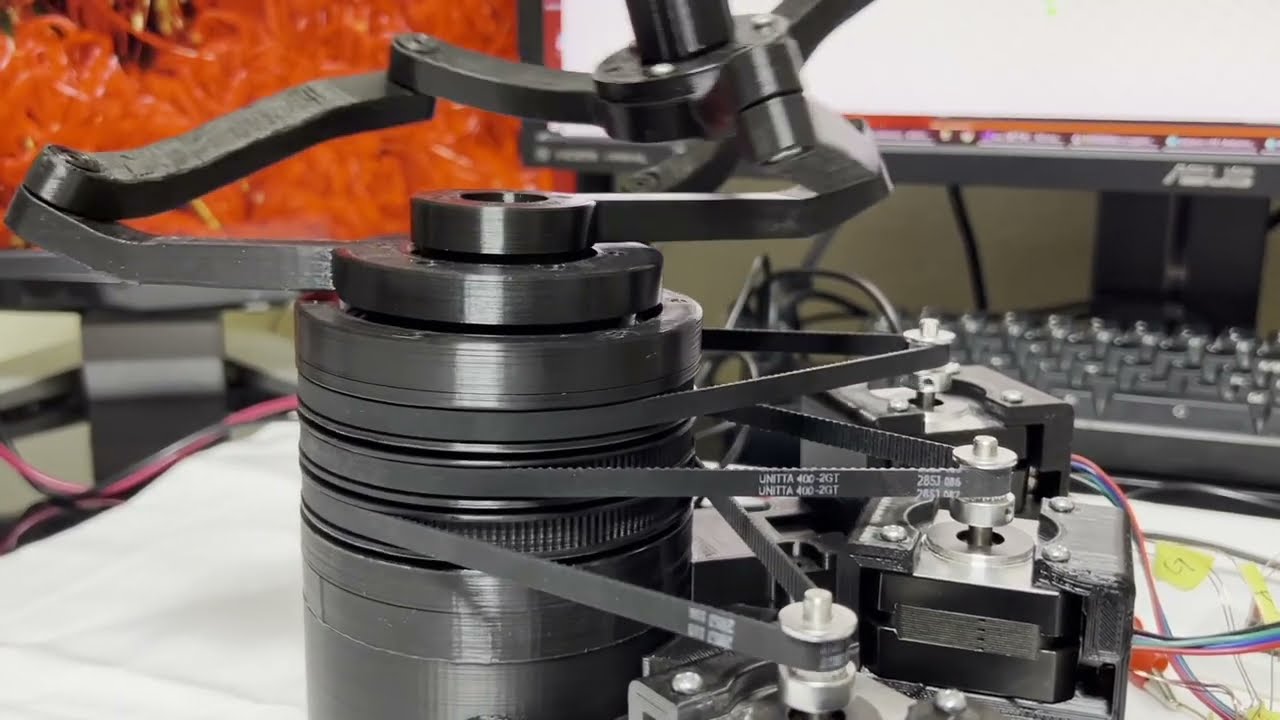
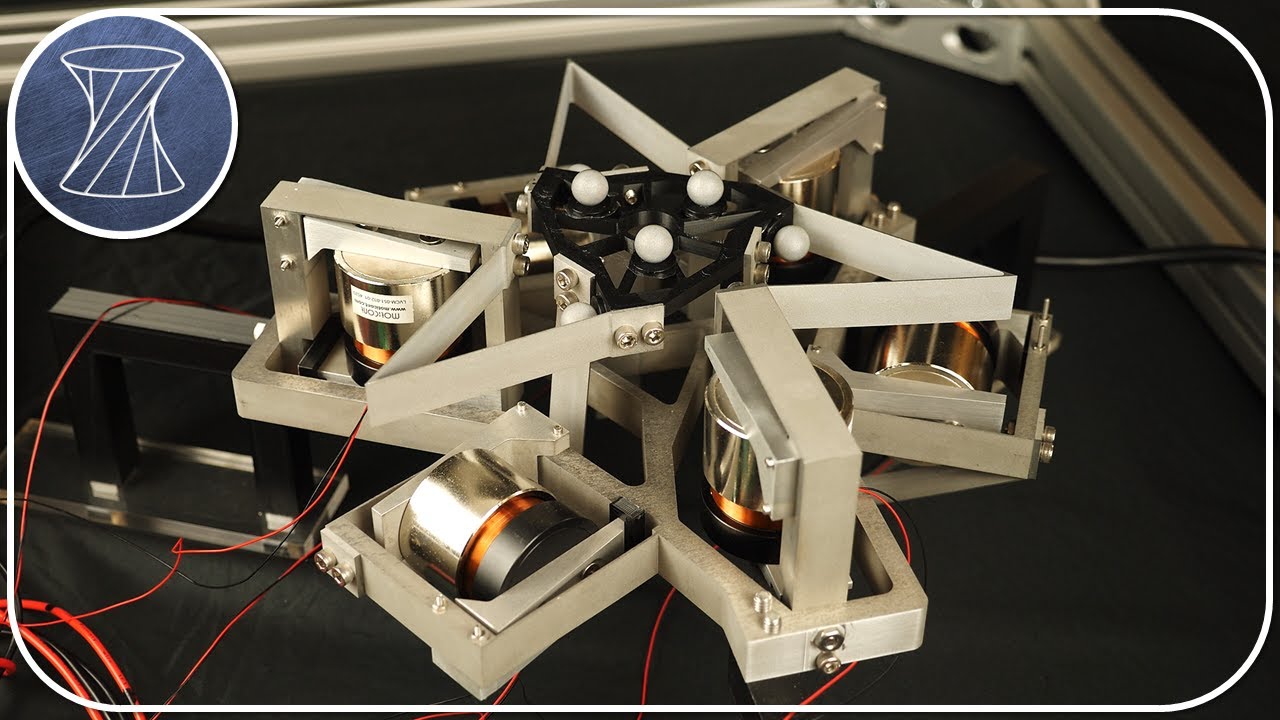
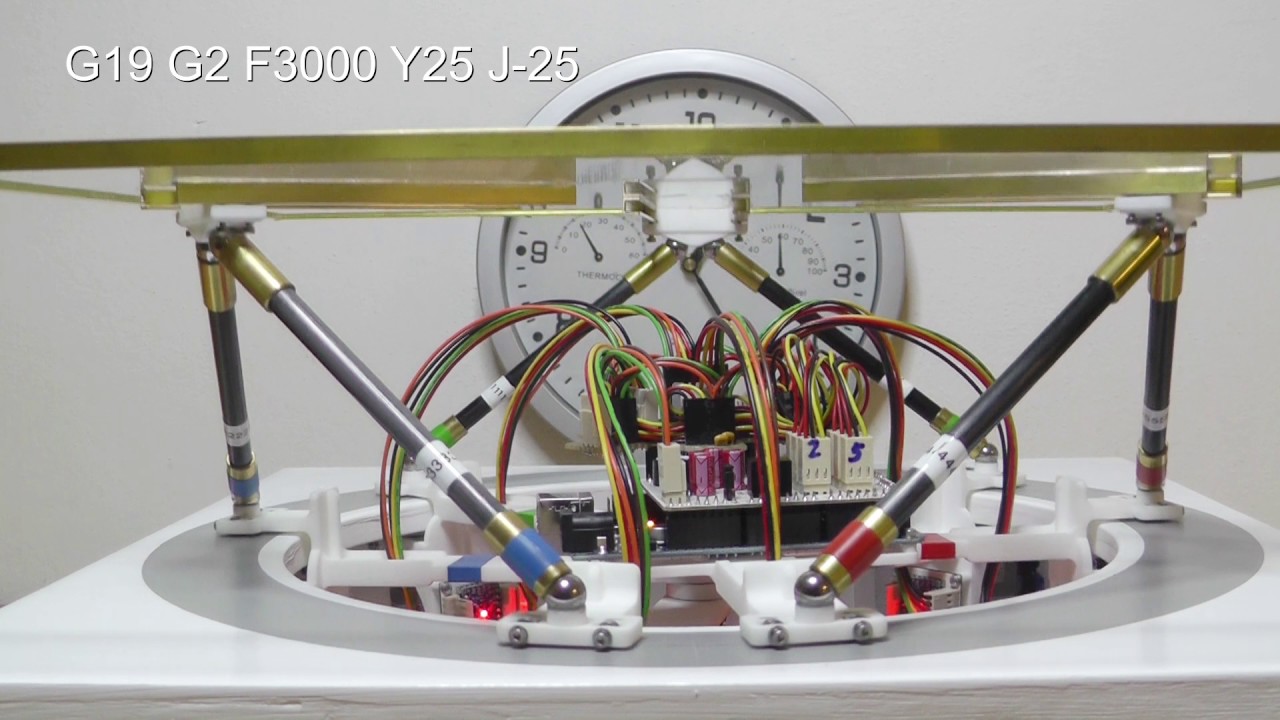
Stewart Platform with Force Control
Автор: Arun Dayal Udai
Загружено: 2017-07-07
Просмотров: 30595
Описание:
Actuated entirely by Dynamixel motors that features Torque Control and hence the platform can demonstrate force-control apart from position and velocity control.
The GUI with integrated controller was fully developed using Java with OpenGL based graphics.
Actuators drivers are python based.
Improved top platform design allows more roll and pitch angles.
Designed and Programmed by: Ashutosh Dayal
Video created by: Ansh Dayal
Mentor: Arun Dayal Udai
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: