Stanford PhD Defense: Christopher Agia | Robotics & AI
Автор: Christopher Agia
Загружено: 2026-02-23
Просмотров: 218
Описание:
Department of Computer Science, Stanford University
Date & Time: Monday, Feb 23, 2026, 1:00pm PST
Title: Deployment-Time Reliability of Learned Robot Policies
Abstract:
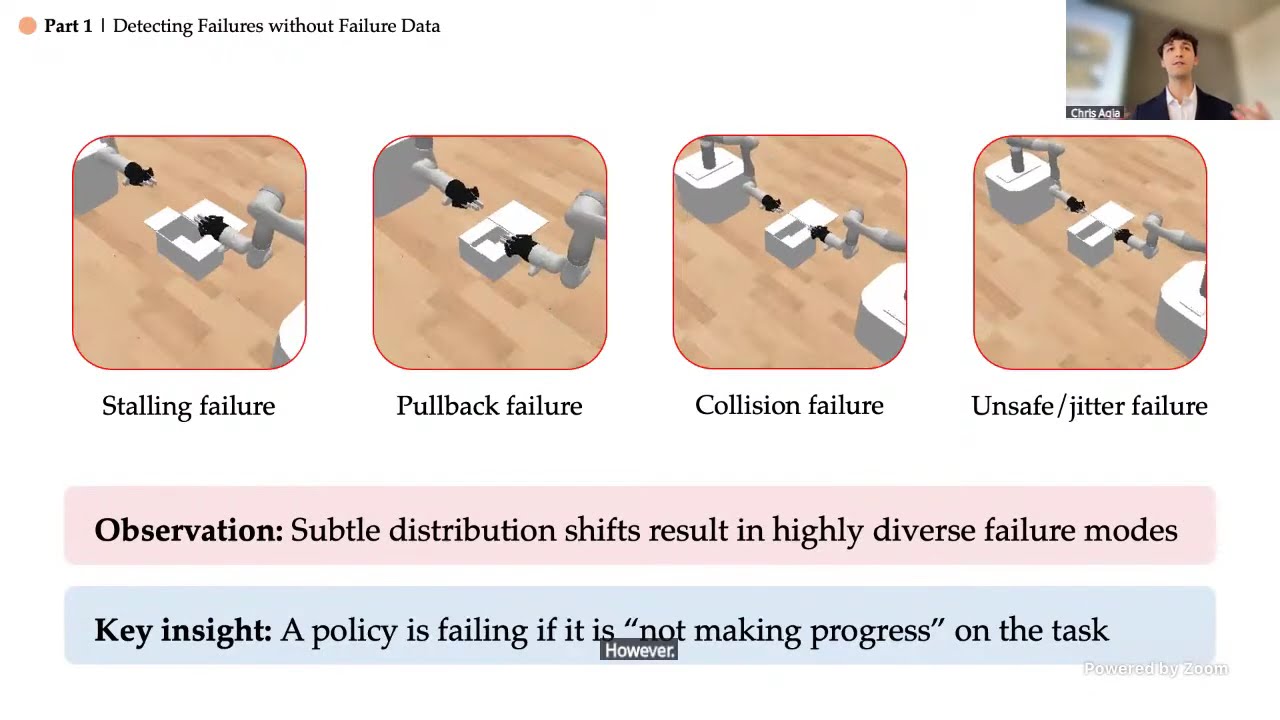
Recent advances in learning-based robot manipulation have produced policies with remarkable capabilities. Yet, reliability at deployment remains a fundamental barrier to real-world use, where distribution shift, compounding errors, and complex task dependencies collectively undermine system performance. In this talk, I argue that reliability must be addressed not only through training-time advances, but also through complementary deployment-time mechanisms that operate around learned policies. I present three contributions. First, I introduce runtime monitoring methods that detect impending failures online by identifying inconsistencies in closed-loop behavior and deviations in task progress. Second, I show how influence-function–based analysis connects deployment-time successes and failures to individual training demonstrations, enabling principled diagnosis and data curation. Third, I address long-horizon execution by formulating policy coordination as maximizing the success likelihood of behavior sequences and extend this framework to language-specified tasks. Together, these contributions elevate deployment to a first-class problem in robot learning and advance practical foundations for improving the reliability of learned manipulation systems in the real world.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: