AI pathfinding for Self-Driving Cars using Hybrid A* algorithm (open source)
Автор: Erik Nordeus
Загружено: 2019-03-20
Просмотров: 15408
Описание:
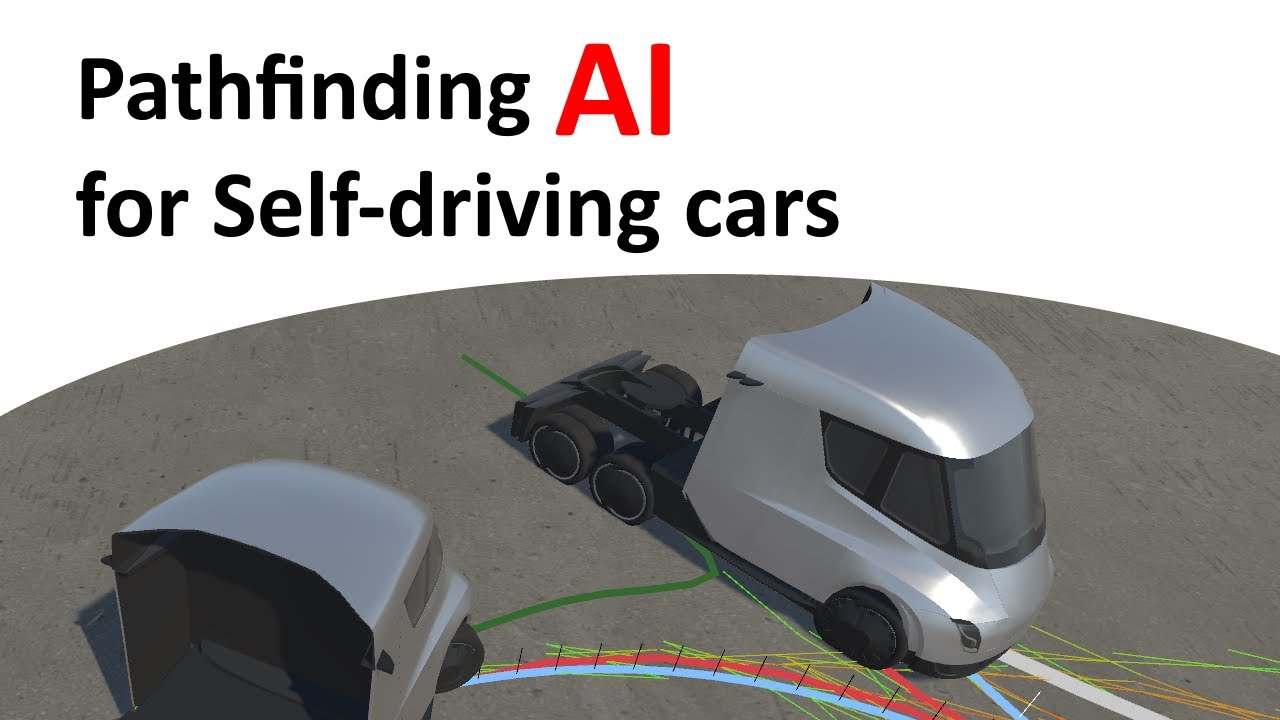
Simulation of how pathfinding (and path planning) and path-following works for self-driving cars visualized in Unity game engine. There are multiple algorithms within the Artificial Intelligence (AI) area that generates paths for robots (a self-driving vehicle is just a robot). But the one I chose to simulate autonomous navigation for vehicles is a machine learning path planning search algorithm called Hybrid A* (A Star). This algorithm is used in real robotics (including by Tesla Motors) and is even working on self-driving semi trucks with trailers (with some simple modifications). You can use the algorithm for automatic parking as well. To follow the path, the vehicles are using a PID controller.
0:00 Car
0:55 Semi
4:00 Semi with trailer
DOWNLOAD
You can download the open source code here (you can also download a build to play around with the visualization and try to mess with the algorithm). It is made with Unity using C# and should work with all Unity versions ► https://github.com/Habrador/Self-driv...
SOCIALS
You should follow me on TWITTER ► / eriknordeus
...or click here to find my other social links LINKTREE ► https://linktr.ee/eriknordeus
READ MORE
To make the basic Hybrid A* algorithm find a path faster, it's also using Reeds-Shepp curve (the white line is the shortest Reeds Shepp path), Voronoi Fields, and Flowfields. To make the path smoother to follow, it's using Gradient Descent.
The tree lines you see between the start and end position are:
Red: the path from Hybrid A Star
Blue: the smooth path, which has been moved "forward" to make it easier for the car to follow it. The lines pointing up are the waypoints
Green: the smooth path, which has been moved in the mirrored direction of "forward" to make it easier for the vehicle to follow it when reversing
I think Tesla is using something similar in their smart summon feature algorithm (which is part of the Full Self-Driving Capability (FSD) version of Tesla Autopilot) where the Tesla car can drive on its own to where the owner is waiting.
You can divide the problem into two parts: Path Planning and Navigation. Hybrid A star takes care of the planning part, and then to follow the path the vehicles in the video are using a PID controller.
#unity3d #madewithunity #unity #ai #artificialintelligence #selfdrivingcars #tesla #teslamotors #OpenSource #summon #smartsummon #fsd #autopilot #fullselfdriving #visualization #simulation #pathfinding #pathplanning #machinelearning #robotics #robots #machinelearning #hybridastar #astar #autonomousdriving #parking #automaticparking #selfdrivingcar #autonomous #autonomouscar #pid #pidcontroller #pathfollowing
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: