Collision Free Planner - PRM with RoboDK
Автор: RoboDK
Загружено: 2019-05-14
Просмотров: 12458
Описание:
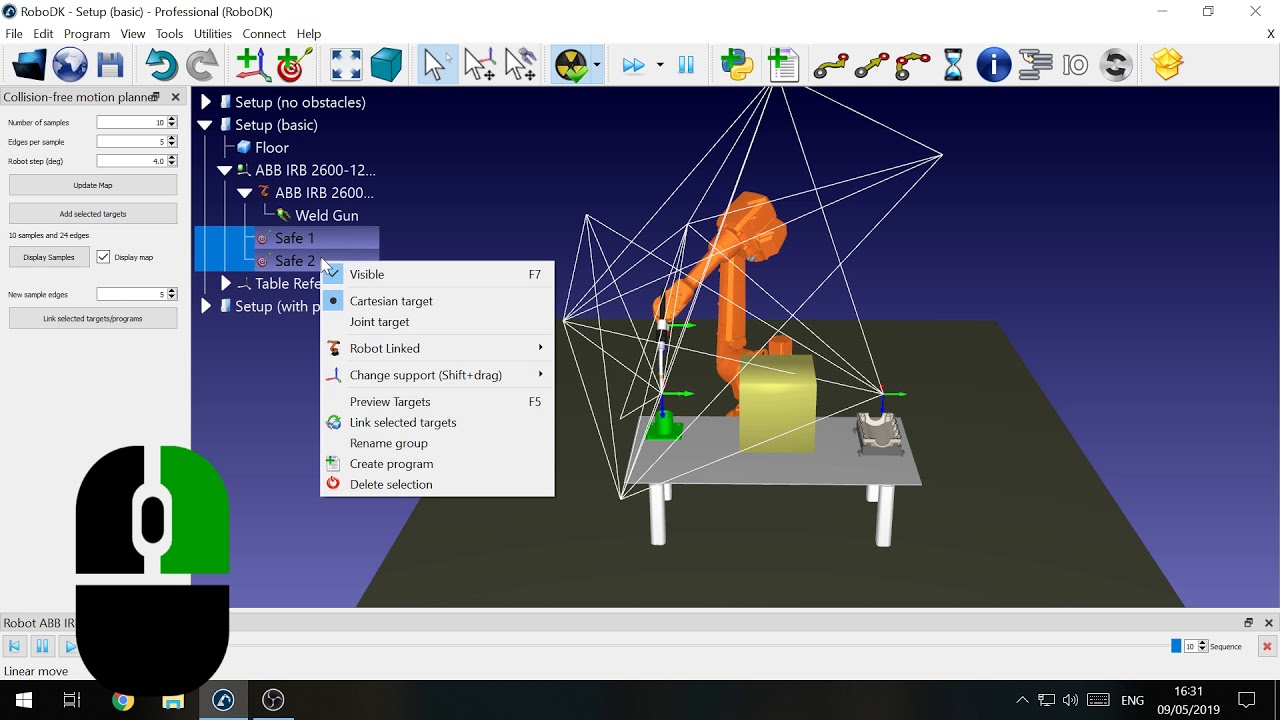
RoboDK's motion planning feature automatically creates collision-free paths within the robot's workspace. This feature uses a motion planning algorithm called Probabilistic RoadMaps (PRM).
First, a map is created of the free space in the robot's workspace. This map is then used to quickly generate collision-free trajectories during robot programming.
Table of content:
00:32 Collision-Free Motion Planner
01:35 New Setup
02:54 Motion Planner Panel
04:00 Display Map (10 Samples)
04:30 Constraining the Workspace
06:02 Join 2 Targets with a Collision-Free Path
10:38 Default Map (100 Samples)
12:02 Join 2 Programs with a Collision-Free Path
This video is part of the RoboDK Documentation. You can learn more in the RoboDK Documentation here:
https://robodk.com/doc/en/Collision-A...
__________________________________________________________________________
ABOUT RoboDK
RoboDK is a powerful and cost-effective simulator for industrial robots and robot programming.
No programming skills are required with the intuitive RoboDK graphical interface. Easily simulate and program robot arms offline from your 3D models and deploy robot programs avoiding singularities, axis limits, and collisions with just a few clicks.
RoboDK has an extensive library of over 1200 robot arms from 80 robot manufacturers and offers a wide variety of robot manufacturing applications.
SOCIAL MEDIA CHANNELS
🤖 LinkedIn: / robodk
🤖 Facebook: / robodkinc
🤖 X: https://x.com/robodkinc
🤖 Instagram: / robodk
🤖 TikTok: / robodk3d
USEFUL LINKS
1 - Download your free RoboDK Trial: https://robodk.com/download
2 - RoboDK Robot Library (currently supported robots): https://robodk.com/library
3 - RoboDK Help and Resources: https://robodk.com/help
4 - How to Simulate and Program your Robot: https://robodk.com/simulation
5 - RoboDK Tips and Tricks: https://robodk.com/doc/en/Tips-and-Tr...
6 - RoboDK Success Stories: https://robodk.com/examples
7 - Get your RoboDK Questions Answered: https://robodk.com/forum/
8 - Learn with RoboDK Academy: https://robodk.com/academy
9 - Pricing: https://robodk.com/pricing
CONTACT US
https://robodk.com/contact
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:










![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)







