Скачать
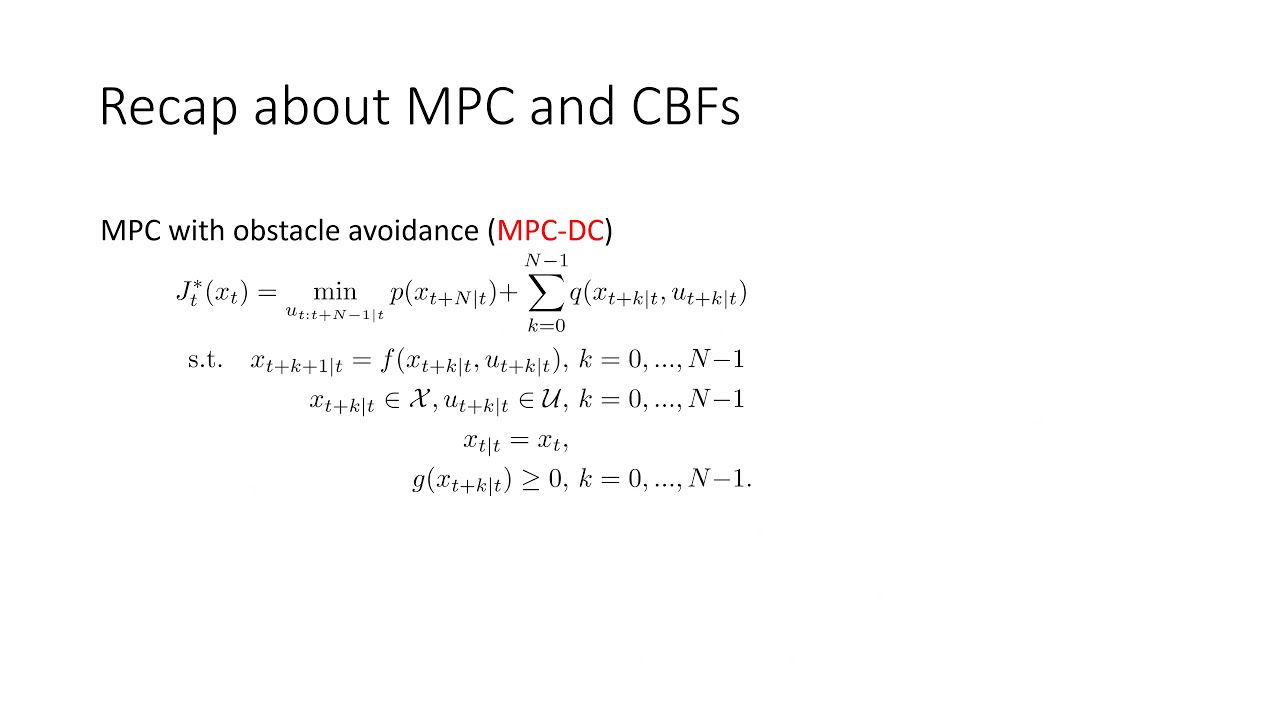
Jun Zeng - Safety-Critical Model Predictive Control with Discrete-Time Control Barrier Function
Автор: Jun Zeng
Загружено: 2021-01-31
Просмотров: 1071
Описание:
5 minute talk for NorCal Control Workshop 2021.
More descriptions could be found at https://github.com/HybridRobotics/MPC... and manuscript can be found at https://arxiv.org/abs/2007.11718.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















