Leveraging learned monocular depth prediction for pose estimation and mapping on UUVs
Автор: Eleni Kelasidi
Загружено: 2026-01-09
Просмотров: 15
Описание:
Authors
Job Marco , Botta David , Reijgwart Victor , Ebner Luca , Studer Andrej , Siegwart Roland , Kelasidi Eleni
Abstract
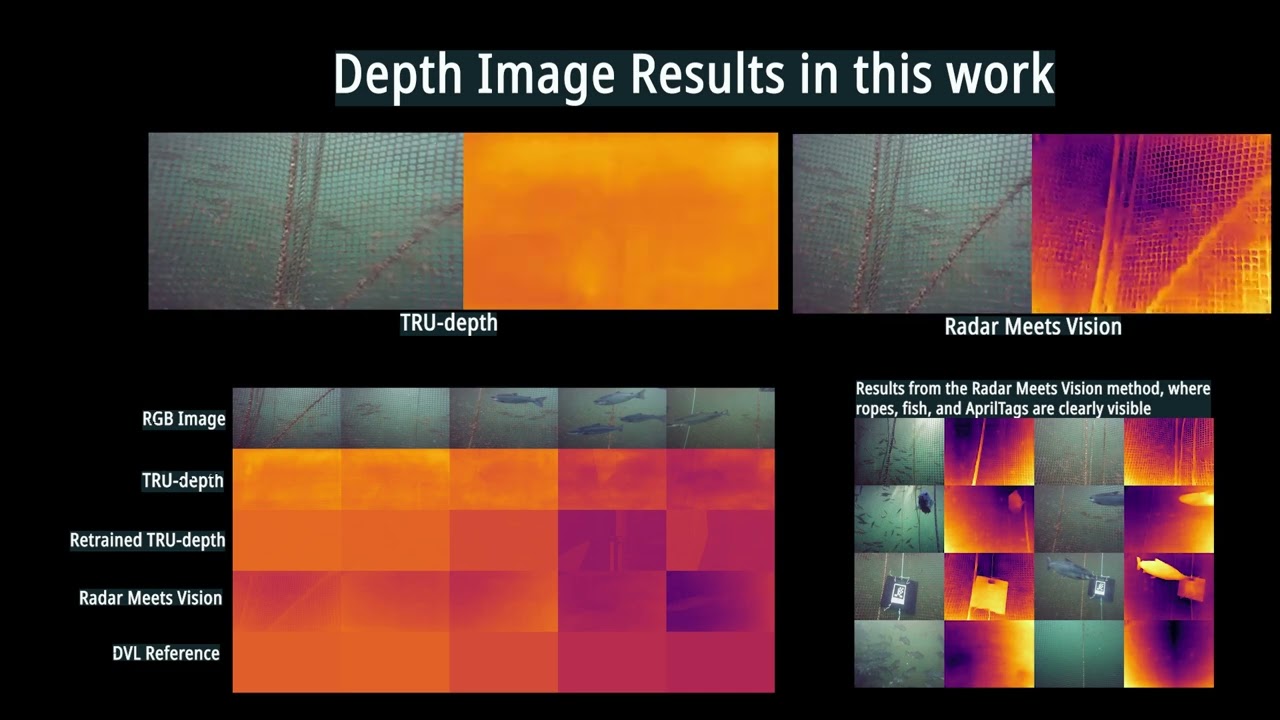
This paper presents a general framework that integrates visual and acoustic sensor data to enhance localization and mapping in complex, highly dynamic underwater environments, with a particular focus on fish farming. The pipeline enables net-relative pose estimation for Unmanned Underwater Vehicles (UUVs) and depth prediction within net pens solely from visual data by combining deep learning-based monocular depth prediction with sparse depth priors derived from a classical Fast Fourier Transform (FFT)-based method. We further introduce a method to estimate a UUV’s global pose by fusing these net-relative estimates with acoustic measurements, and demonstrate how the predicted depth images can be integrated into the wavemap mapping framework to generate detailed 3D maps in real-time. Extensive evaluations on datasets collected in industrial-scale fish farms confirm that the presented framework can be used to accurately estimate a UUV’s net-relative and global position in real-time, and provide 3D maps suitable for autonomous navigation and inspection.
Link to article: https://www.frontiersin.org/journals/robot...
This work is conducted in collaboration with SINTEF Ocean, ASL-ETH and NTNU and it was supported by the Research Council of Norway (ResiFarm: NO-327292, CHANGE: N313737)
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















