PI Position Control Testing Different Proportional Gains
Автор: Multi-Robot Systems MRS Lab
Загружено: 2023-07-31
Просмотров: 45
Описание:
Eng. Mamdouh Nabil
Analysis and Development of a Control Architecture for Human-Collaborative Robotic Manipulators in Industrial Applications .
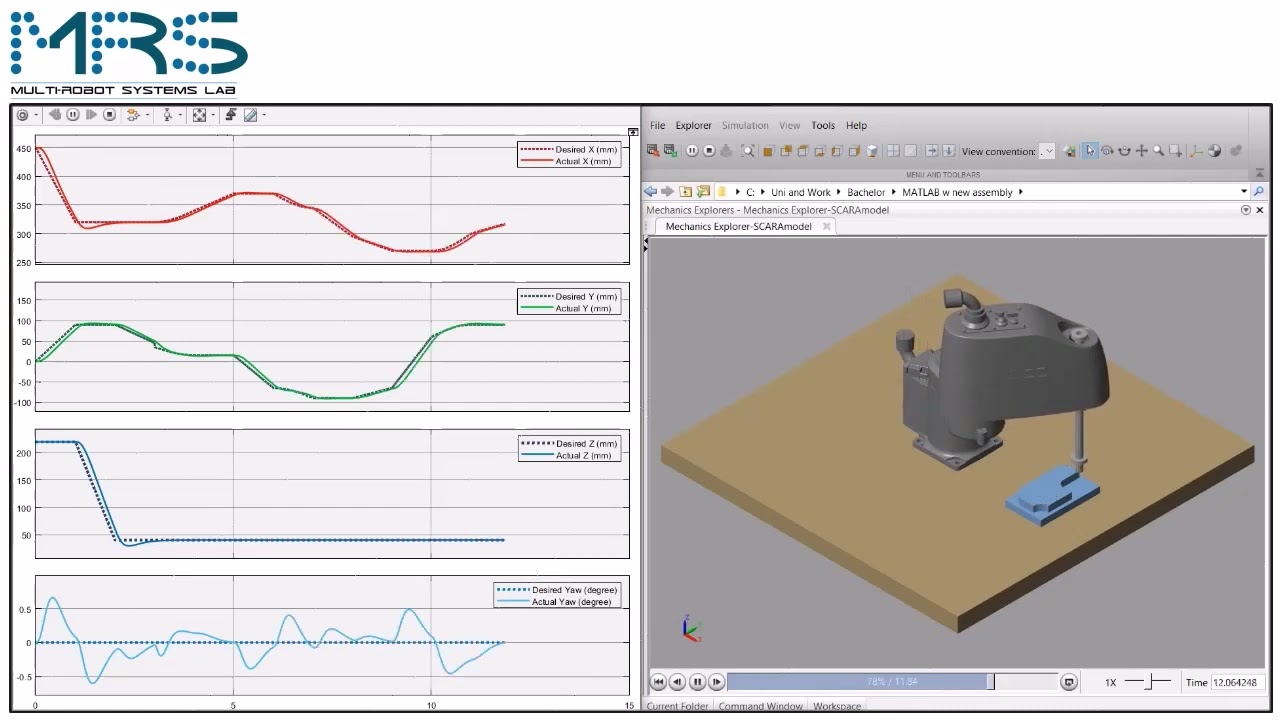
This video shows a designed Proportional-Integral (PI) position control used for trajectory tracking of a certain workpiece. The controller is applied on ABB SCARA robot dynamics for workpiece's tracking purposes. The simulation shows different performance for the system in terms of translational (X, Y, Z) and rotational (Yaw angle) motion tracking concerning different Proportional (P) gains.
Please, visit the research group website for more information about the academic and research activities http://mrs-lab.com/
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















