Оценка скорости, конечные разности (2): дисперсия ошибки прогнозирования, статистический анализ
Автор: Modeling, Identification, Control (A. Sala)
Загружено: 2026-02-14
Просмотров: 81
Описание:
В этом видео продолжается разбор конкретного случая из видео • Speed estimation by finite differences (1)... , подробно рассматривается технический аспект определения ошибки прогнозирования и её дисперсии при оценке скорости с использованием конечной разности двух положений.
Сначала вычисляется ковариация между состояниями (положение, скорость) в момент времени t=0, скажем, x(0), и в момент времени t=T_s, x(T_s), где T_s — период дискретизации (временной интервал между выборками).
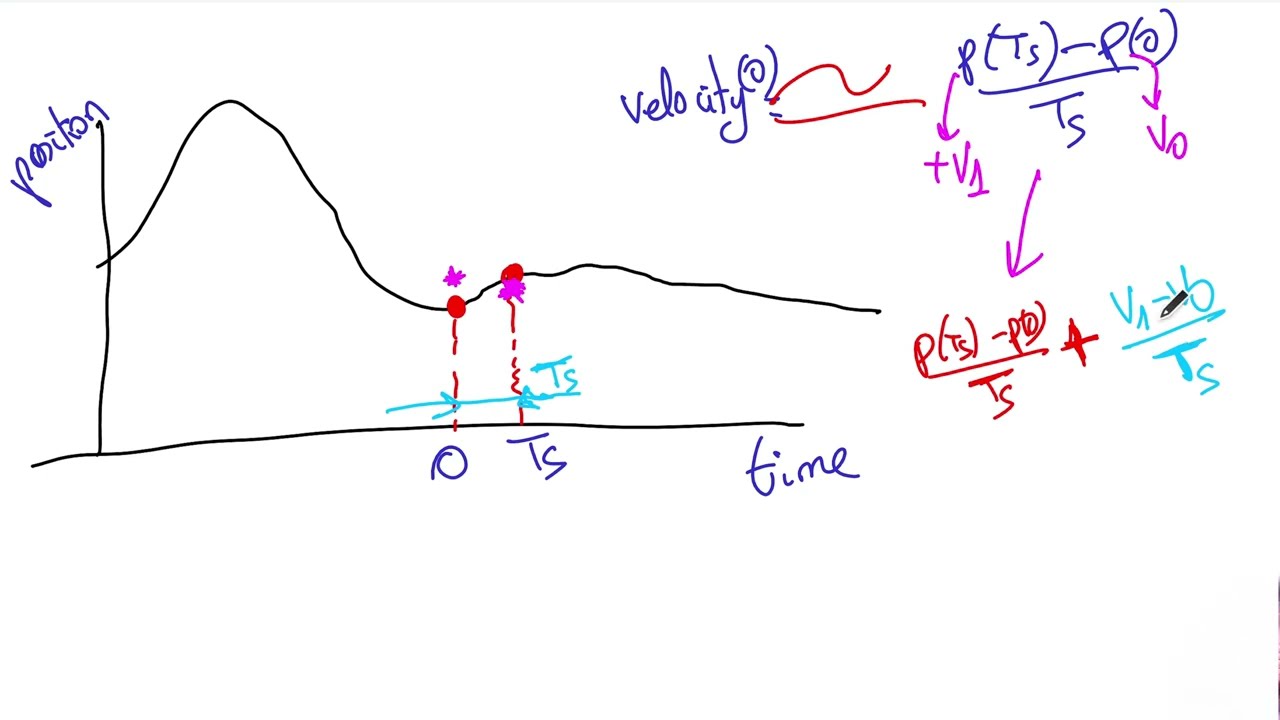
С помощью этой ковариационной матрицы проводится анализ главных компонент (собственные значения ковариации и собственные векторы), и подтверждается, что действительно существует «почти детерминированное» уравнение (с очень малой дисперсией), связывающее скорости и приращения положения, а именно (pos(T_s)-pos(0))/T_s\approx (vel(0)+vel(T_s))/2.
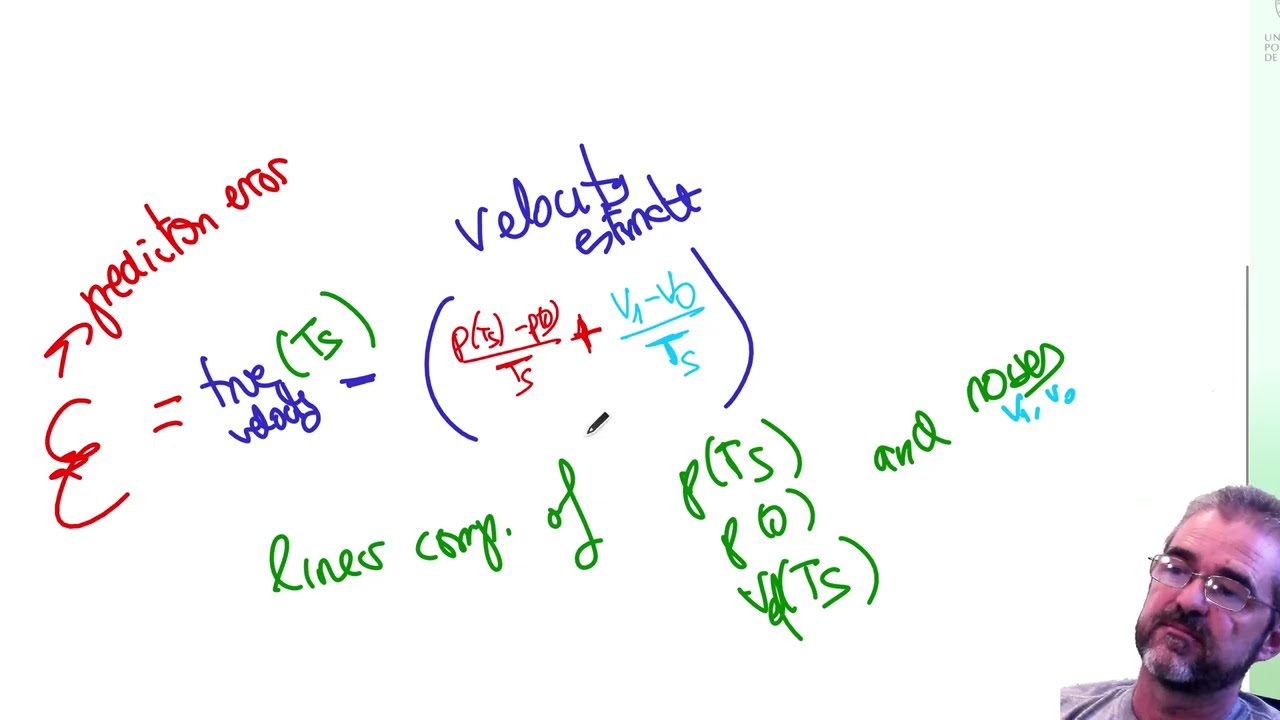
Если необходимо использовать координаты для прогнозирования «текущей» скорости (а не среднего значения текущей и прошлой скорости), то следует оценить дисперсию ошибки прогнозирования ρ = (pos(T_s)-pos(0))/T_s - vel(T_s). Именно это и делается в заключительной части видео: сначала без шума измерений, а затем с шумом измерений. Результаты вычислений визуализируются для двух значений периода дискретизации T_s; оптимальный период дискретизации будет рассмотрен в следующем видео с примером использования метода • Видео , а сравнение с фильтром Калмана — в видео TODOxxxxx.
________________
PDF/код/заметки доступны по ссылке: https://personales.upv.es/asala/YT/V/...
#стохастика #теорияуправления #фильтрация #обработкасигналов
_________________
Антонио Сала, UPV
Университетские лекции
Полная коллекция видео доступна по ссылке: https://personales.upv.es/asala/YT/in...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:
![Теорема выборки Шеннона: формулы гауссовского процесса [2/2], теория, примеры [Обработка сигналов]](https://imager.clipsaver.ru/jVTbTBXjy9s/max.jpg)