Online pose correction on a FANUC robot
Автор: CoRoETS
Загружено: 2017-03-08
Просмотров: 3823
Описание:
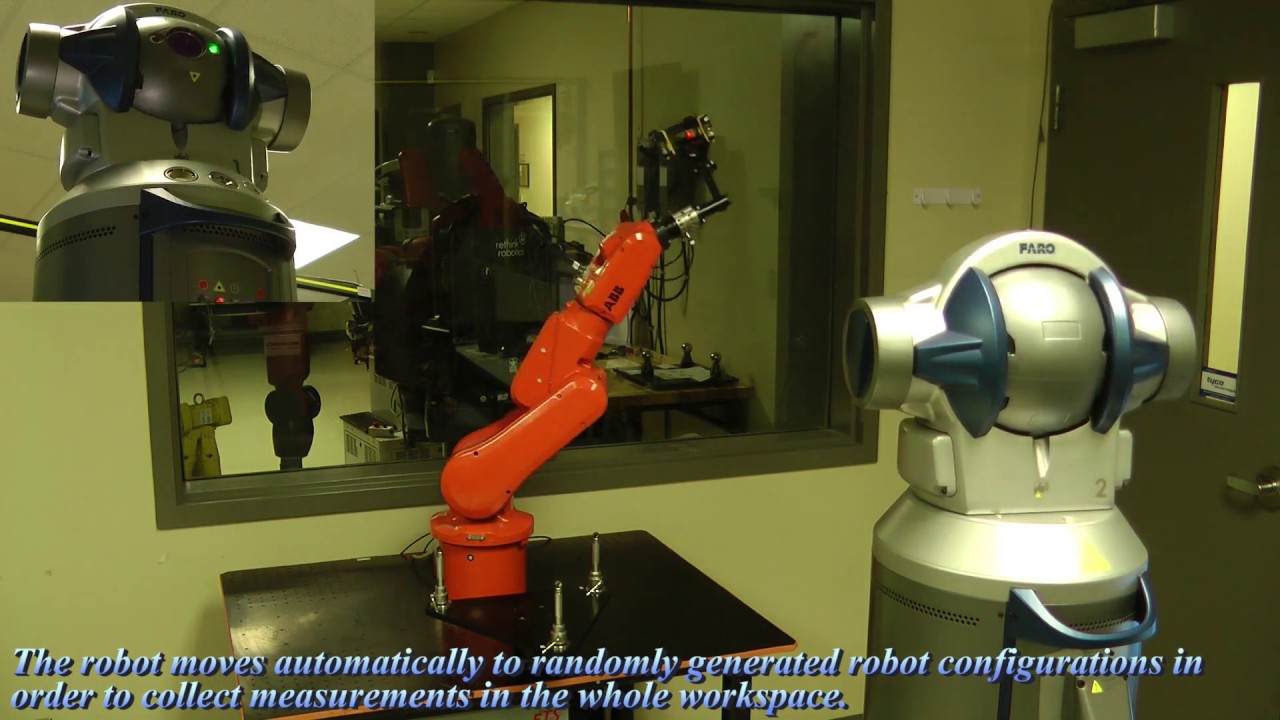
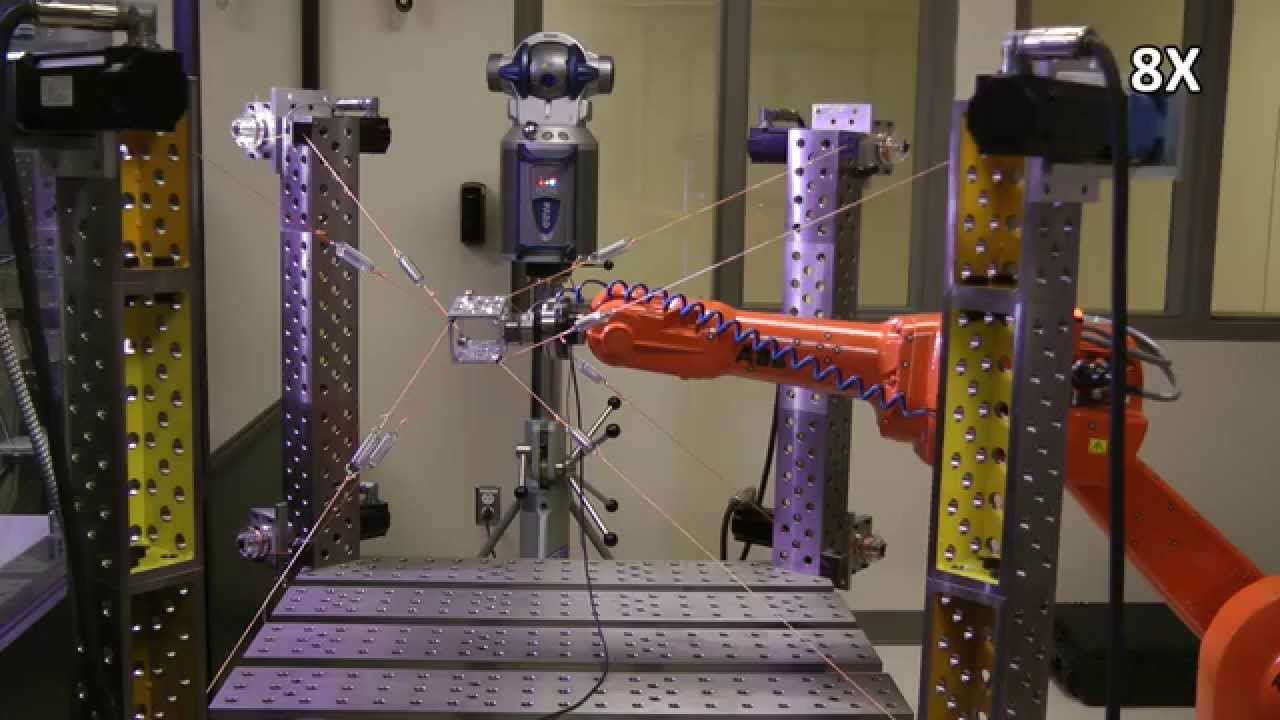
This video illustrates the use of FANUC's DPM (Dynamic Path Modification) option for correcting the pose of the robot end-effector in real time. The pose is measured with Creaform's C-Track, a dual-camera photogrammetry measurement device. The pose measurements are fed to a PC, which filters them, and finally parses them to the FANUC robot.
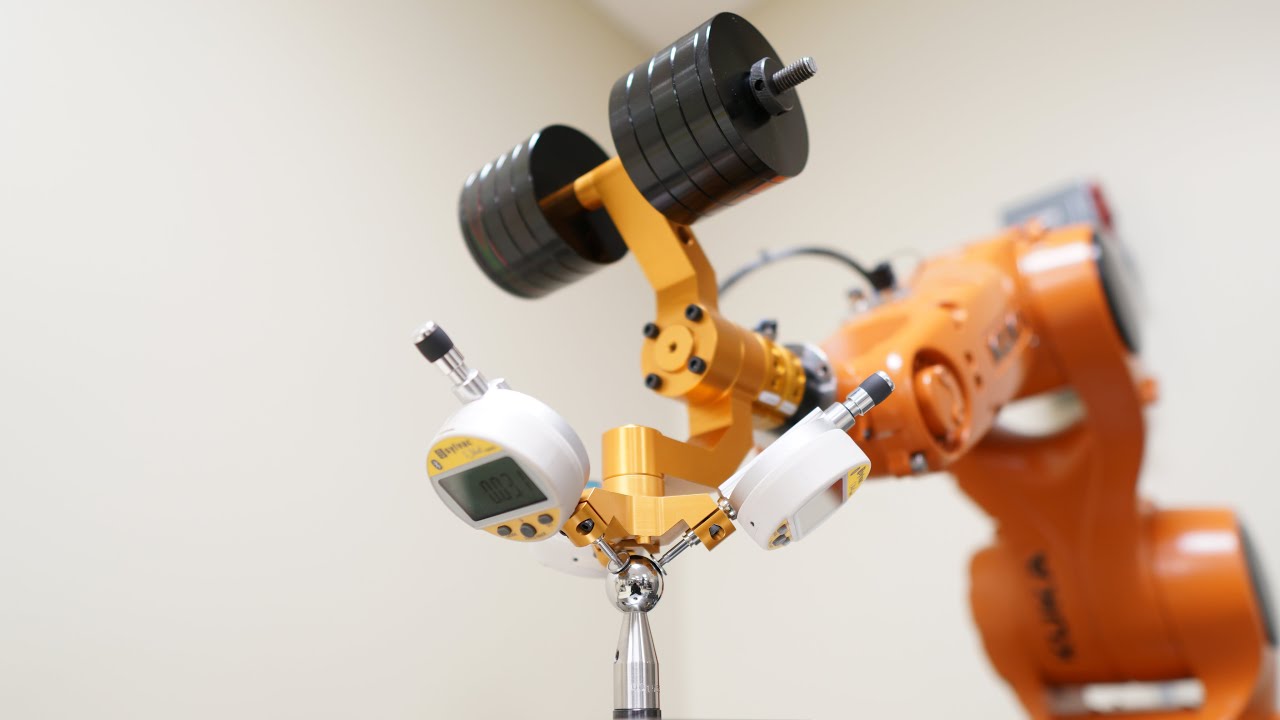
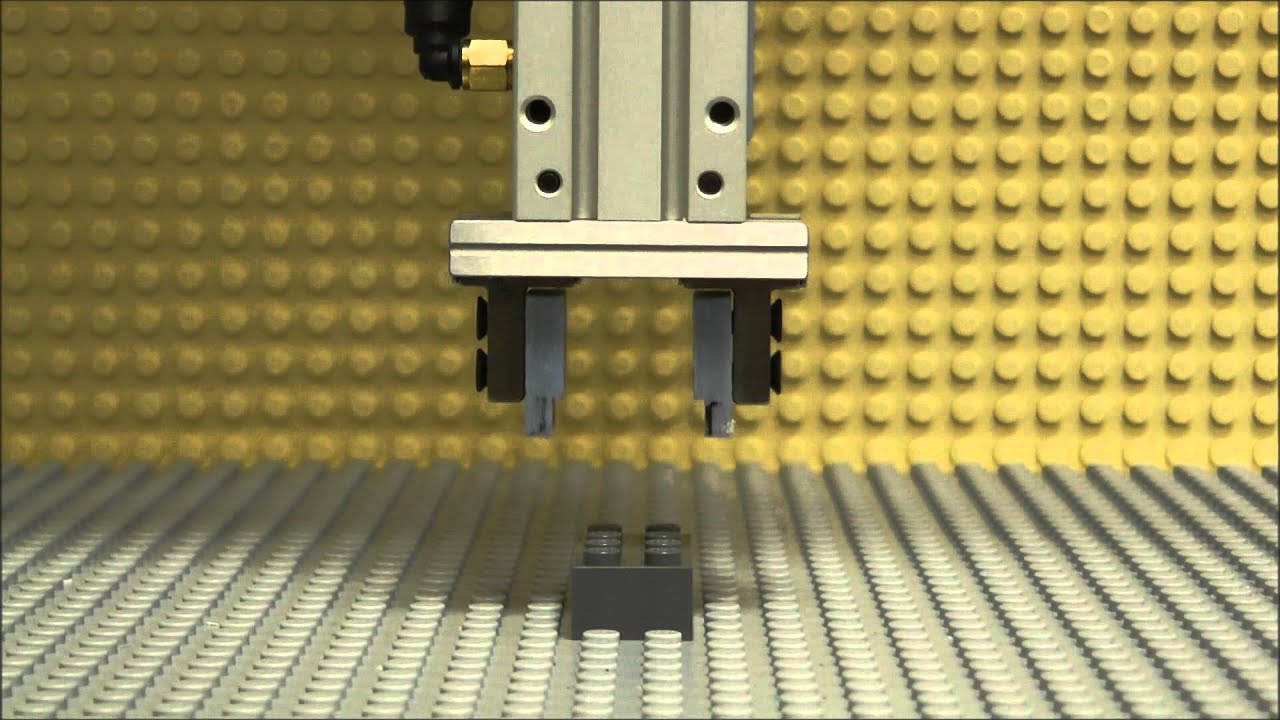
With this setup, the robot end-effector can be positioned with about 0.050 mm of relative accuracy (accuracy with respect to the nearby bloc). A second video ( • Validation of online pose correction on a ... ) shows the validation process based on the use of another high-accuracy 3D measurement device.
The whole setup can also be used for path correction, but the task is much more difficult due to the limited frequency of measurements of the C-Track.
This project was funded by CRIAQ, Creaform, GE Aviation and Coriolis Composites.
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: