State Machine Testing HopperBot
Автор: Paul Peretz
Загружено: 2026-02-25
Просмотров: 4
Описание:
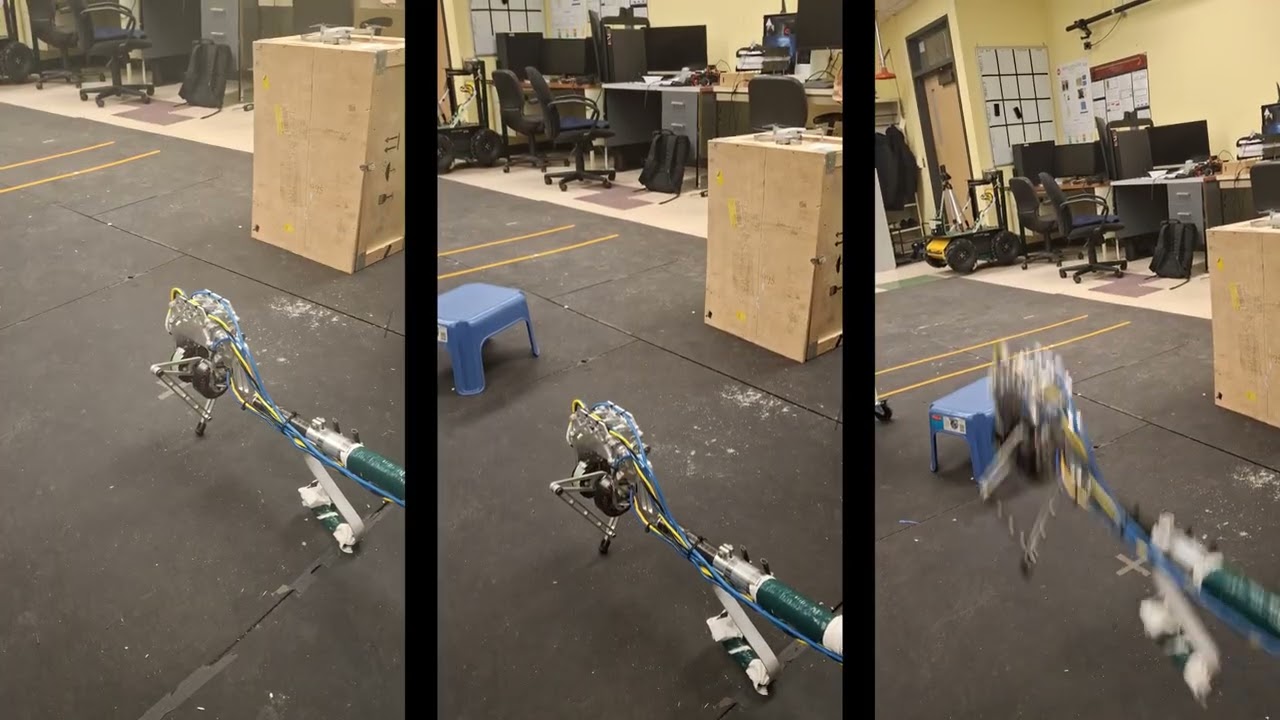
Demonstration of the real-time C++ state machine driving a boom-arm constrained single-leg Minitaur hopper. This system uses an EtherCAT master (Acontis EC-Master) to manage high-frequency flight mechanics, foot placement, and virtual spring-damper landings.
State Machine Breakdown:
State 1 & 11 (Initialization & Retraction): The leg commutes to its zero position, extends to 0.24m, and retracts to a safe 0.17m starting length.
State 2 (Jump Motion): The force controller pushes the leg to 0.29m with up to 80N of radial force, launching the robot into the air.
State 22 & 23 (Apex & Raibert Control): In flight, a low-pass filter detects the jump's apex. The controller calculates horizontal velocity and sets the target landing angle.
State 3 & 4 (Landing Pose & Soft Touchdown): The leg swings to the target angle. Motor force is intentionally capped at 50N to safely "feel" for the ground without violently air-kicking.
State 5 & 51 (Midstance & Energy Injection): Upon impact, the 50N limit is lifted, and the motors act as a stiff virtual spring to absorb the shock. At midstance, energy is injected to propel the next hop.
State 100 (Shutdown): Once the target hop count is reached, the leg retracts, and the drives safely power down.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: