REAL 2020 – Robot open Ended Autonomous Learning competition
Автор: IEEE ICDL Conference
Загружено: 2020-11-06
Просмотров: 132
Описание:
REAL 2020 – Robot open-Ended Autonomous Learning competition
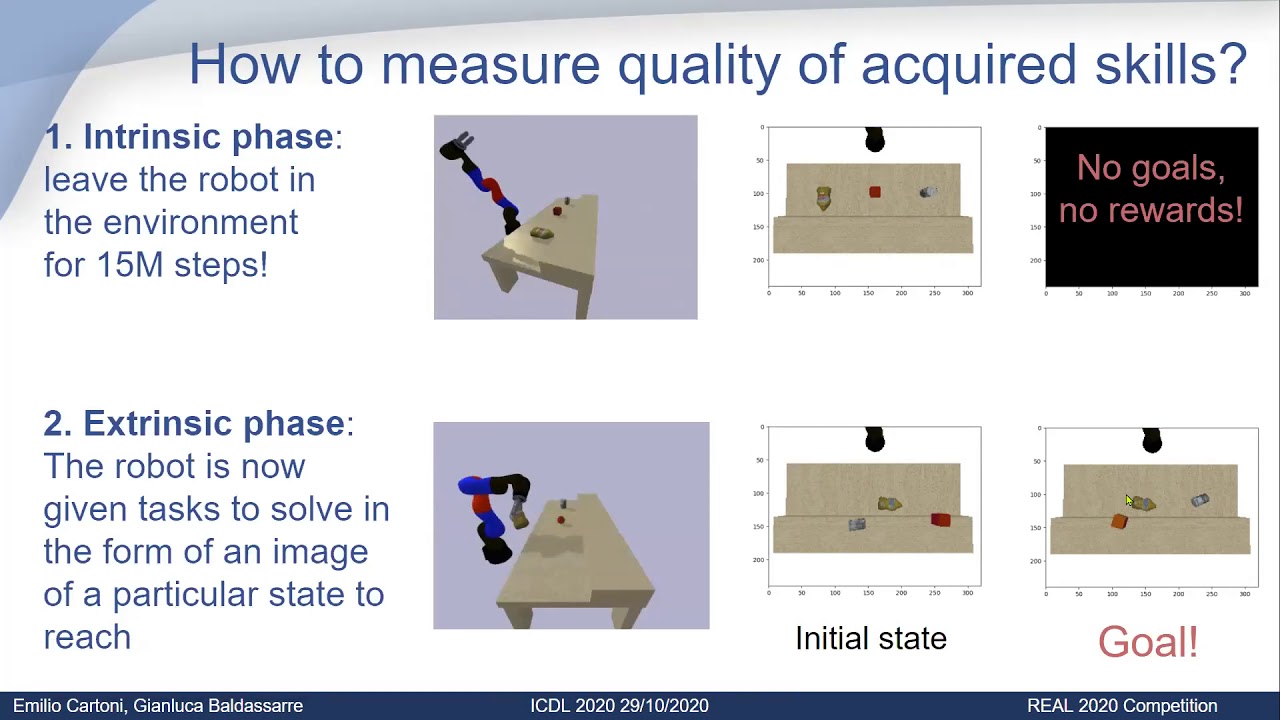
Open-ended learning, also named ‘life-long learning’, ‘autonomous curriculum learning’, ‘no-task learning’, aims to build learning machines and robots that are able to acquire skills and knowledge in an incremental fashion. The REAL competition addresses open-ended learning with a focus on ‘Robot open-Ended Autonomous Learning’ (REAL), that is on systems that: (a) acquire sensorimotor competence that allows them to interact with objects and physical environments; (b) learn in a fully autonomous way, i.e. with no human intervention, on the basis of mechanisms such as curiosity, intrinsic motivations, task-free reinforcement learning, self-generated goals, and any other mechanism that might support autonomous learning. The competition will have a two-phase structure where during a first ‘intrinsic phase’ the system will have a certain time to freely explore and learn in the environment, and then during an `extrinsic phase’ the quality of the autonomously acquired knowledge will be measured with tasks unknown at design time. The objective of REAL is to: (a) track the state-of-the-art in robot open-ended autonomous learning; (b) foster research and the proposal of new solutions to the many problems posed by open-ended learning; (c) favour the development of benchmarks in the field.
https://cdstc.gitlab.io/icdl-2020/pro...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: