Скачать
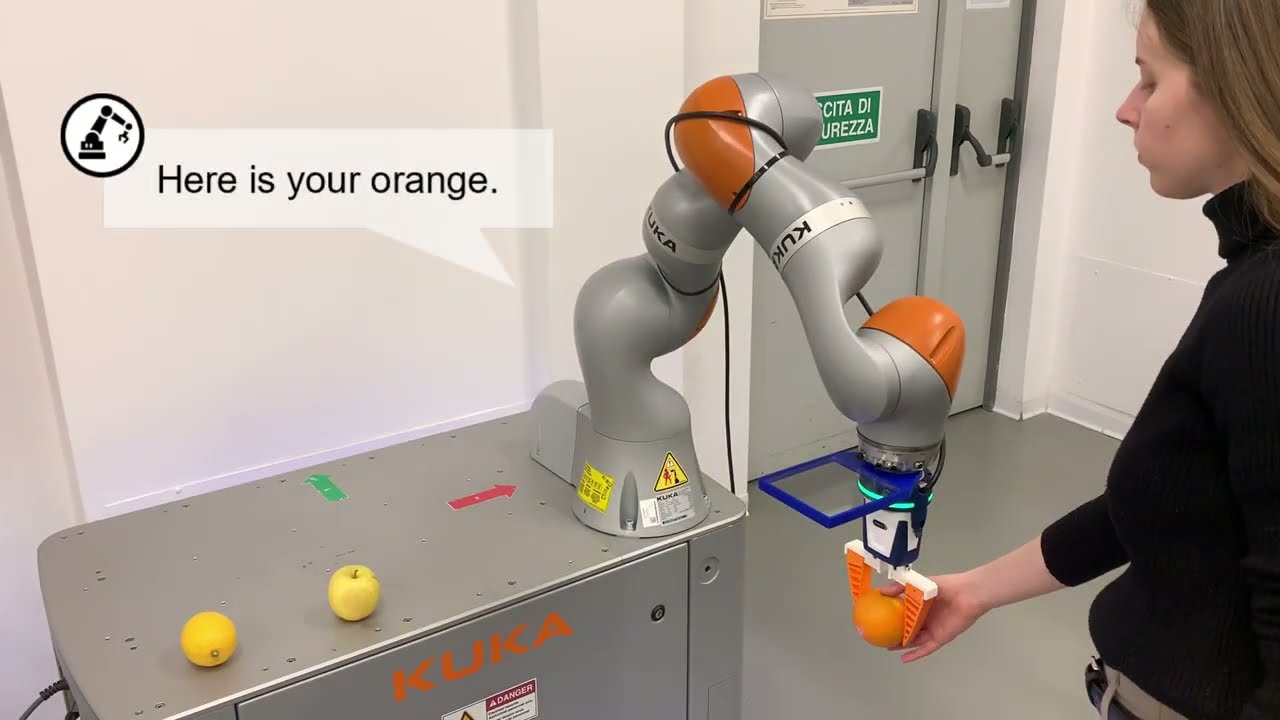
Recognizing reversed and rotated digits via intrinsic robot tactile sensing
Автор: RoboticsTime
Загружено: 2025-10-20
Просмотров: 67
Описание:
We leverage the intrinsic tactile sensing capabilities of collaborative robots to recognize digits drawn by humans on an uninstrumented touchpad mounted to the robot’s flange. A data augmentation method accounts for reversed and rotated digits inputs. This methodology is implemented on a real robot in a fruit delivery task, demonstrating its potential to assist individuals in everyday life.
Dataset zenodo: https://zenodo.org/records/15107070
Preprint arXiv: https://arxiv.org/abs/2504.00167
Website: https://ts-robotics.github.io/pHRI-DIGI/
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:







![[4K FULL HD] Relaxing Water Background | 1 HOUR | Calm Water Wallpaper (No Sound)](https://imager.clipsaver.ru/y9PTNTSpGJs/max.jpg)