Скачать
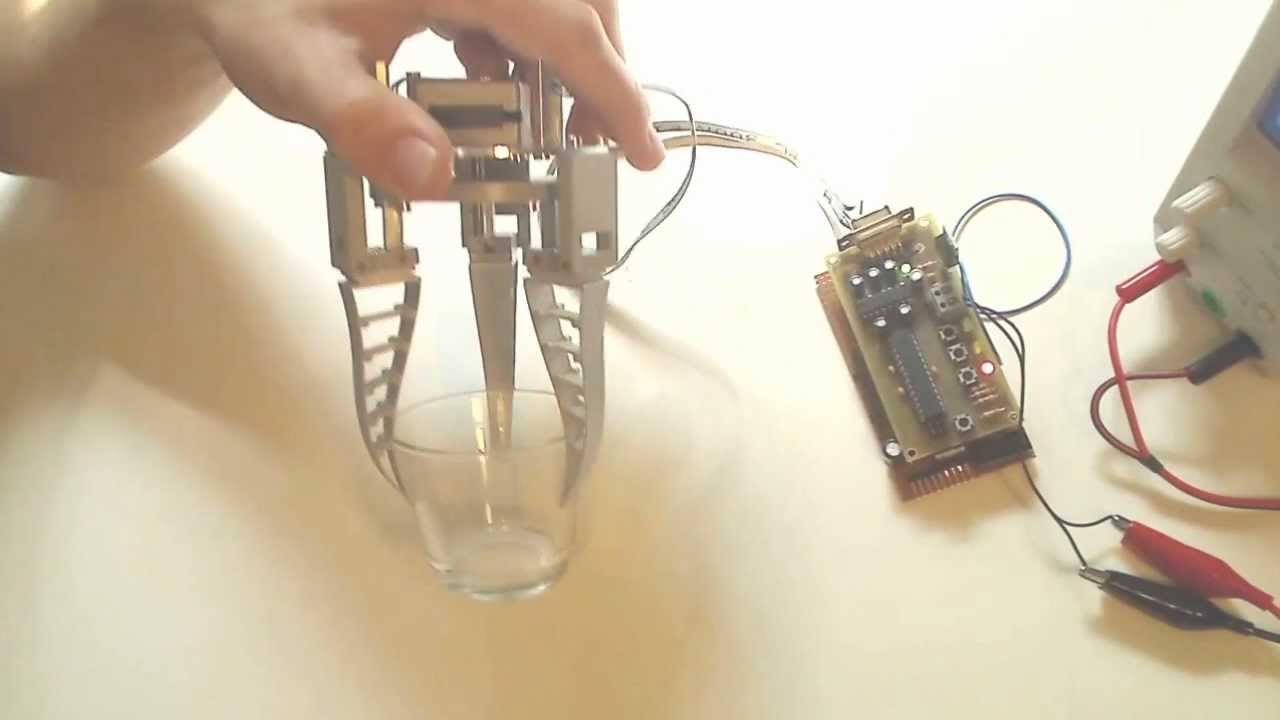
Fin-ray based TSA gripper test with soft and rigid grasp
Автор: Interactive Robotic Systems Lab at KAIST
Загружено: 2020-03-29
Просмотров: 1973
Описание:
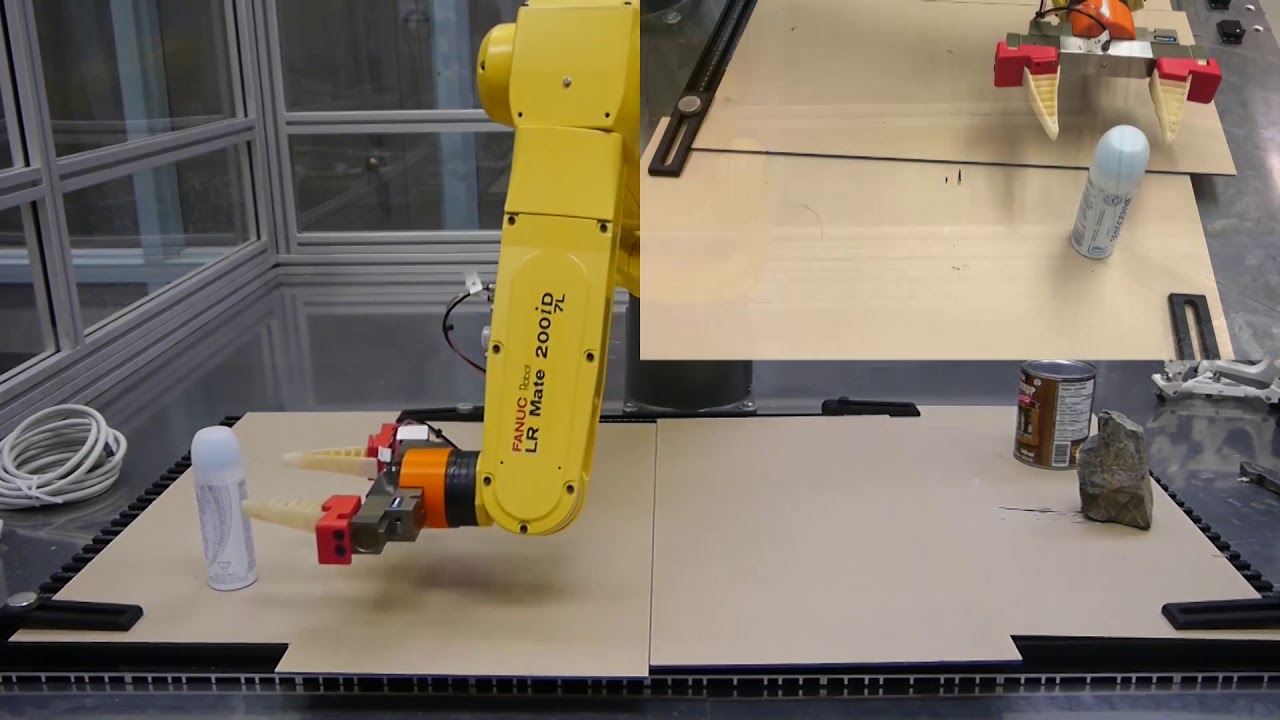
This video demonstrates the grasping performance of the Fin-ray structure based TSA gripper.
It can grasp a wide range of objects with a deformable structure that can passively adapt to the shape of the object. It can handle a broad range of object's stiffness, ranging from a soft fruit all the way to a rigid smartphone, without using any force or tactile sensor.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: