ROS2 Project: Building an Autonomous Robot that Finds and Follows Objects Using Only LiDAR
Автор: Balasubramaniyan
Загружено: 2025-12-04
Просмотров: 21
Описание:
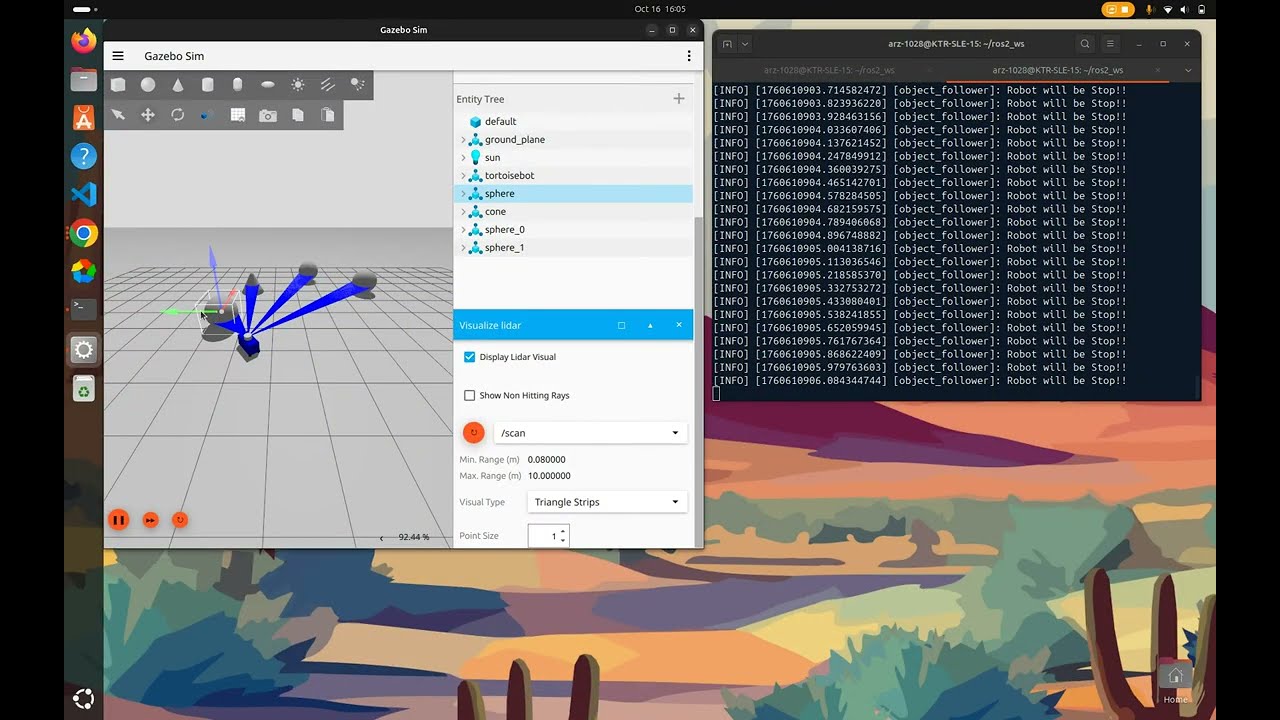
In this complete ROS2 Jazzy project, we implement LiDAR-based Object Detection and Following for a differential drive robot using Gazebo Harmonic 8.9 for simulation! Learn how to create an autonomous robot that detects and follows objects using only 2D LiDAR data - perfect for service robots, human following, or warehouse applications.
🚀 Modern Stack Used:
ROS 2 Jazzy Jalisco (Latest LTS release)
Gazebo Harmonic 8.9 (Official Gazebo version for ROS2 Jazzy)
Python 3.10+ with ROS2 client library
🔧 What We're Building:
A complete autonomous system where a robot:
Scans its environment using a simulated 2D LiDAR sensor
Detects & Clusters objects from raw laser scan data
Identifies the closest/target object to follow
Intelligently Follows while maintaining a safe distance
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:







![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://image.4k-video.ru/id-video/X3uZq2joiW8)











