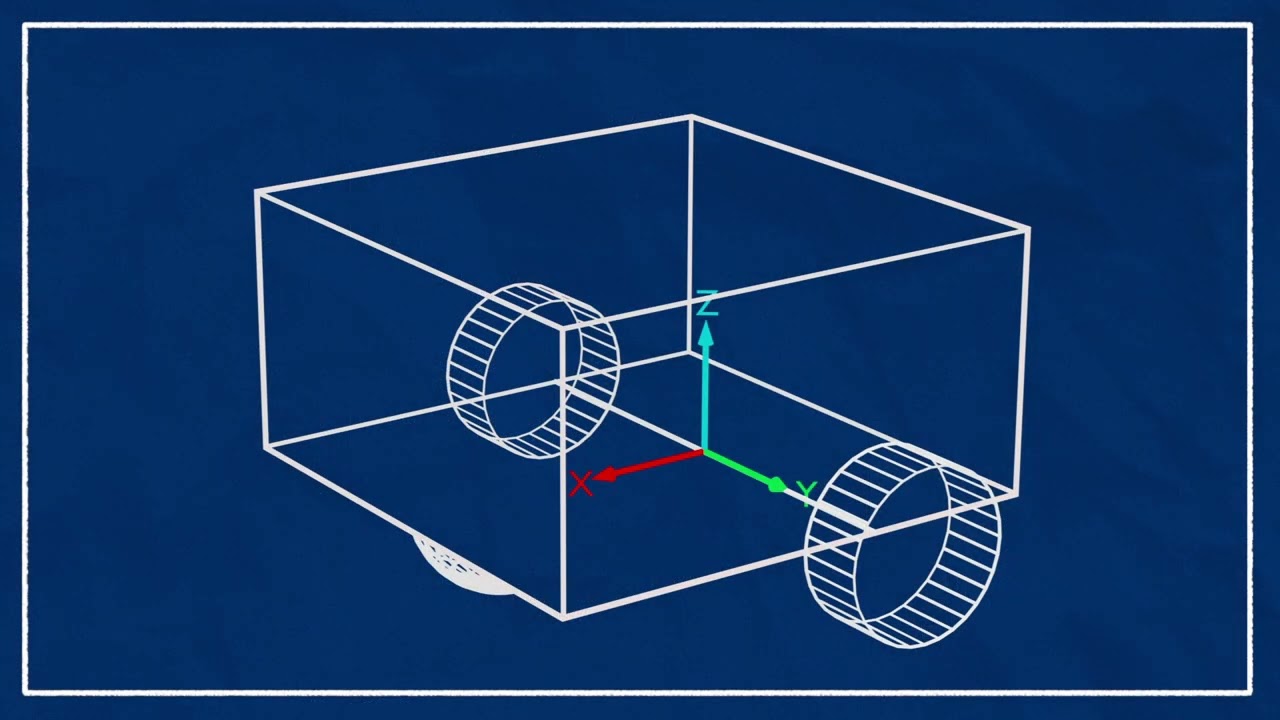
Создание грубой 3D-модели нашего робота с помощью URDF
Автор: Articulated Robotics
Загружено: 2022-02-25
Просмотров: 166958
Описание:
Используя URDF, мы можем быстро создать черновой 3D-проект нашего робота, который вскоре сможем использовать для моделирования. Сопутствующая запись в блоге доступна по адресу https://articledrobotics.xyz/mobile-r...
Обзор TF: • The ROS Transform System (TF) | Getting Re...
Обзор URDF: • Why do I think you should build this robot?
Коммит на данном этапе: https://github.com/joshnewans/articub...
Файл макросов инерции: https://github.com/joshnewans/articub...
00:00 — Введение
00:40 — Дифференциальный привод Концепция
02:12 — Подготовительные этапы
02:43 — Обзор важных идей
04:22 — Создание файла сердечника и базовой связи
08:54 — Шасси
12:35 — Ведущие колёса
17:55 — Опорное колесо
20:11 — Геометрия столкновения
21:22 — Инерция
25:10 — Сохранение и завершение
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: