Скачать
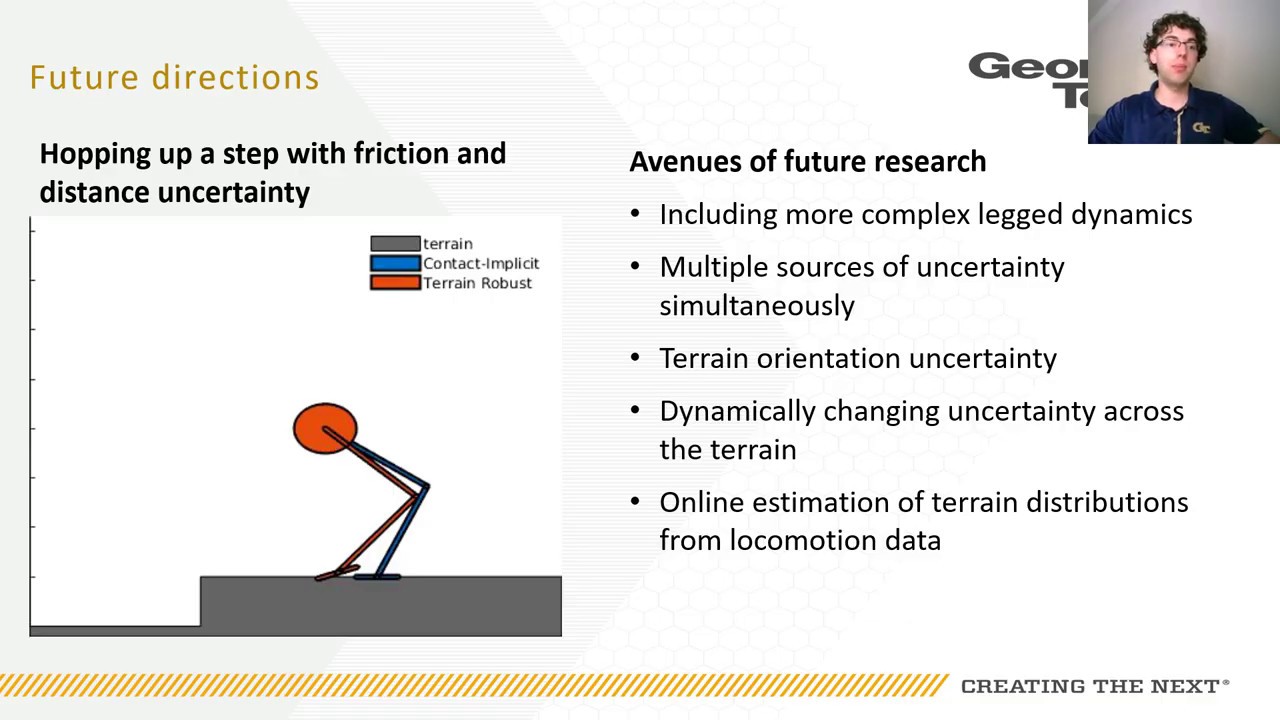
Robust Trajectory Optimization over Uncertain Terrain. --- RSS Workshop on Robust Autonomy
Автор: GaTech LIDAR Group
Загружено: 2020-07-10
Просмотров: 204
Описание: This work is led by Luke Drnach from the LIDAR group. We proposed a robust contact-implicit trajectory optimization for safe locomotion over uncertain terrain.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)













![Как происходит модернизация остаточных соединений [mHC]](https://image.4k-video.ru/id-video/jYn_1PpRzxI)

